실행하면 자동으로 주피터가 열린다. 주피터 환경에서 upload를 진행했다. upload는 baseline의 git repository를 전체 git clone한 것을 압축하여 업로드 하였다. 파일이 주피터에 올라갔으면 터미널에서 아래의 명령어를 사용해 압축을 풀었다. (압축 하기, 풀기)
$ tar -xvzf <simpli~~>.tar
ctrl+c를 통해서 서버를 닫은 다음, 다음을 순차적으로 실행하면 정상적으로 동작하는 것을 확인하였다.
docker commit <tf16_with_rboc/ImageName/tag는 자동으로 latest>
도커 허브에 올리기
$ docker login $ export DOCKER_ID_USER=”sb020518” # str변수 정의 해둠 $ docker tag tf16_with_rboc:latest $DOCKER_ID_USER/tf16_with_rbox $ docker push $DOCKER_ID_USER/tf16_with_rbox
[DLPC 환경설정]
DLPC에서 baseline Code를 돌리기 위한 준비를 다음과 같이 환경설정 하였다.
1. virtualenv를 설치하기
패키지와 라이브러리들을 잘 관리하기 위해 virtualenv를 사용한다.
anaconda를 사용하려고 했지만, anaconda는 docker에서 좀 더 아래 Layer여서 사용할 수가 없었다. 또는 docker inside docker 방법으로 내가 활동하는 docker위에 docker를 새로 설치함으로써 내가 위에서 만든 이미지를 다운받아 사용하려고 하였다.
@ 주의 : sudo mv 0~400(with_json).zip\?dl=0 다음과 같이 특수문자를 사용하기 위해 \과 같이 사용해야 한다.
$ sudo wget https://www.dropbox.com/s/jauf/0~400%28with_json%29.zip?dl=0 # 다운 받은 파일의 이름을 바꾼다. $ sudo mv 0~400(with_json).zip\?dl=0 0~400(with_json).zip # 그리고 다음과 같이 압축을 해제한다. $ sudo unzip 0~400(with_json).zip -d ./0~400 # 해당파일을 압축해제. 0_400이라는 폴더 내부에 사진 저장.
\5. 그 다음 파일을 다운받기 위해, send to my directory 또 실행하면 공간부족이라고 뜬다. 따라서, 이전 파일을 지우고 1번~5번까지의 과정을 다시 반복한다.
6. train을 위한 Data Set 만들기
아래와 같은 명령어를 사용해서, 어떤 폴더에 있는 모든 사진(파일)들을 다른 폴더로 옮긴다.
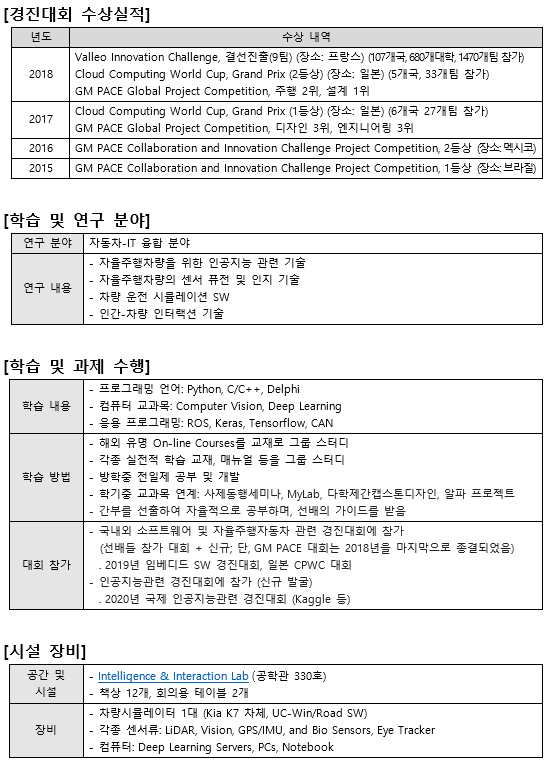
국민대 자동차융합대학 카이(KaAI)팀, ‘Cloud Programming World Cup 2019’ 수상
국민대 자동차융합대학 소속팀 ‘KaAI (Kookmin automotive Artificial Intelligence)’가 지난 2019년 11월 14일 일본 도쿄에서 열린 ‘Cloud Programming World Cup 2019’ 본선에서 ‘Implementation of Digital Twin for Vehicle and its Surroundings’이라는 작품으로 Honorable Judge Award상(2등상)을 차지하고 상금 5만엔을 받았다.
올해 제7회를 맞이한 ‘Cloud Programming World Cup 2019’은 3차원 가상현실(VR), 도시 모델링, 교통 및 드라이빙 시뮬레이션 소프트웨어 등을 개발, 판매하는 일본의 ‘FORUM8’사에서 후원하는 국제 대학생 소프트웨어 경진대회이다. 지난 4월부터 11월까지 한국, 일본, 중국, 타이완, 베트남 등 5개국 39개 팀이 참여하여, 7개팀이 최종 본선 발표 무대에 올랐으며, 국민대 KaAI팀이 2위로 Honorable Judge Award상 (Future Transport Design Award) 상을 수상하였다.
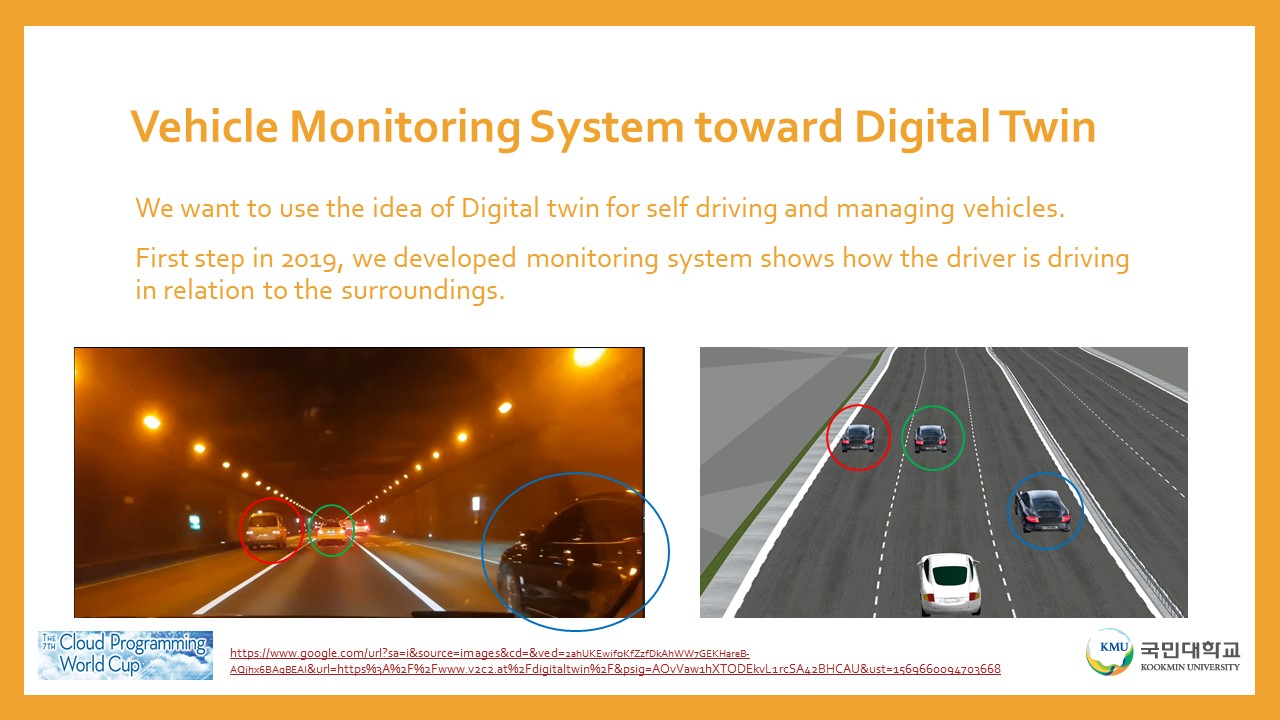
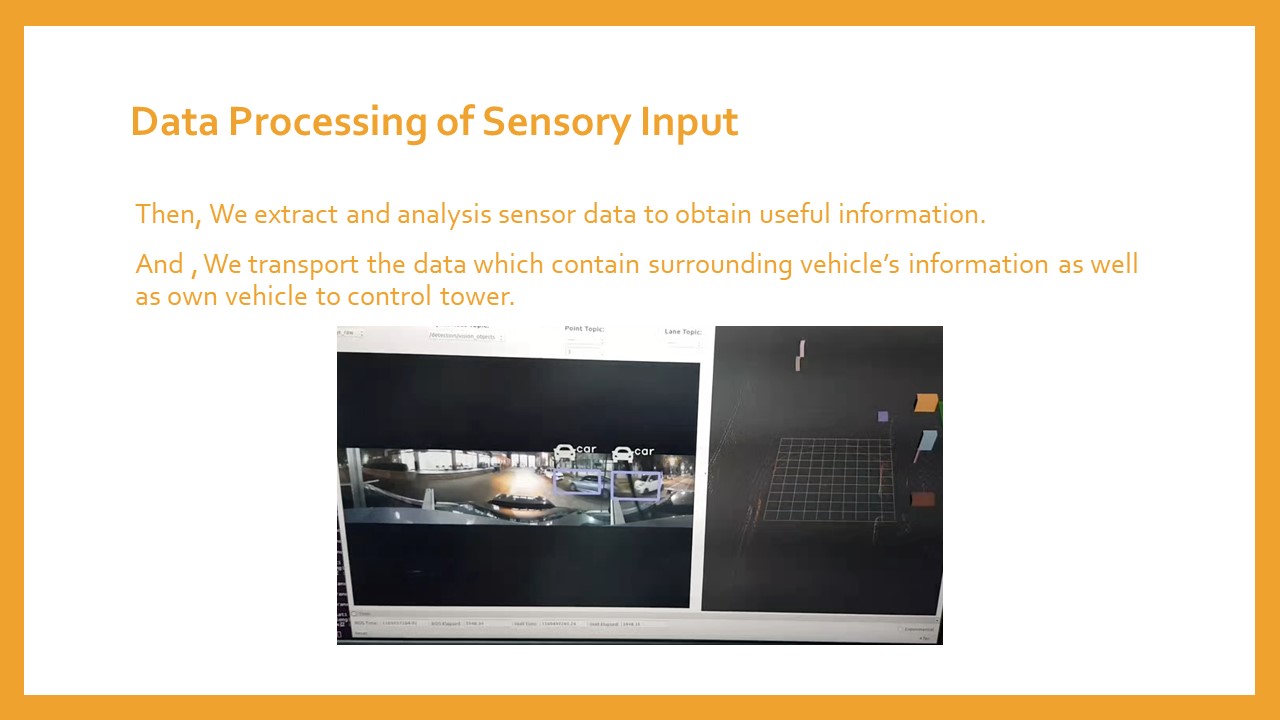
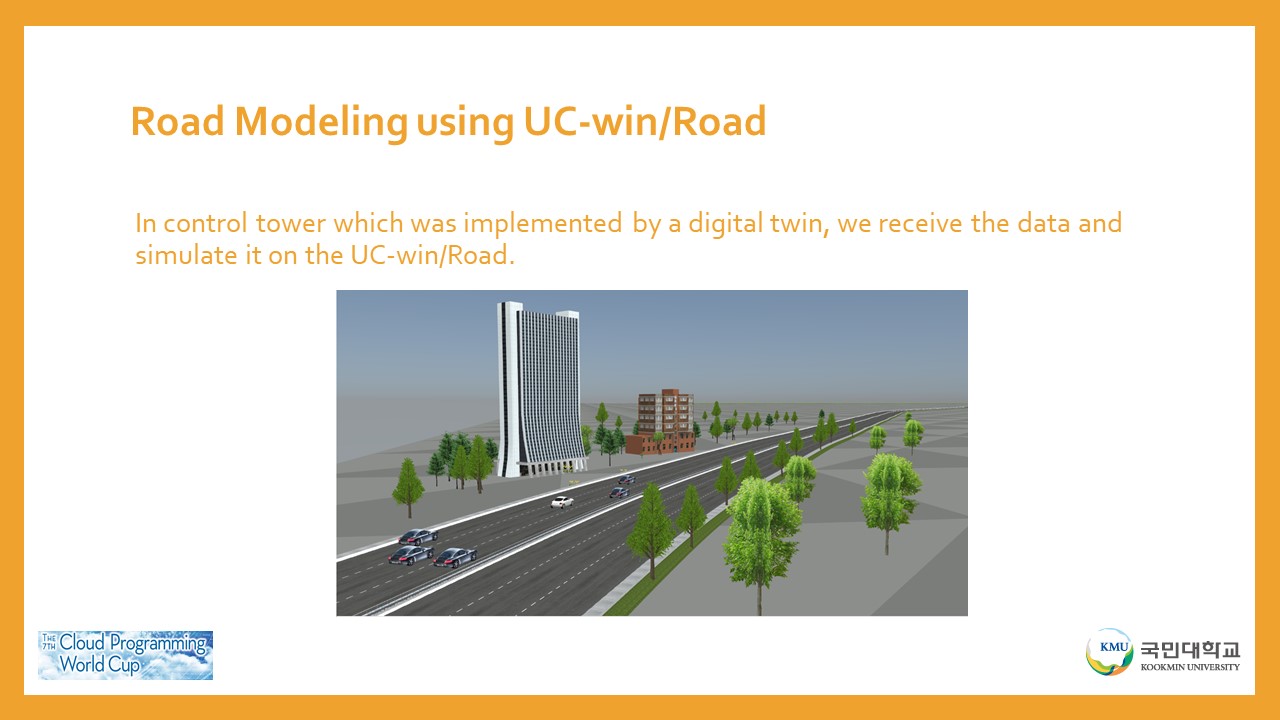
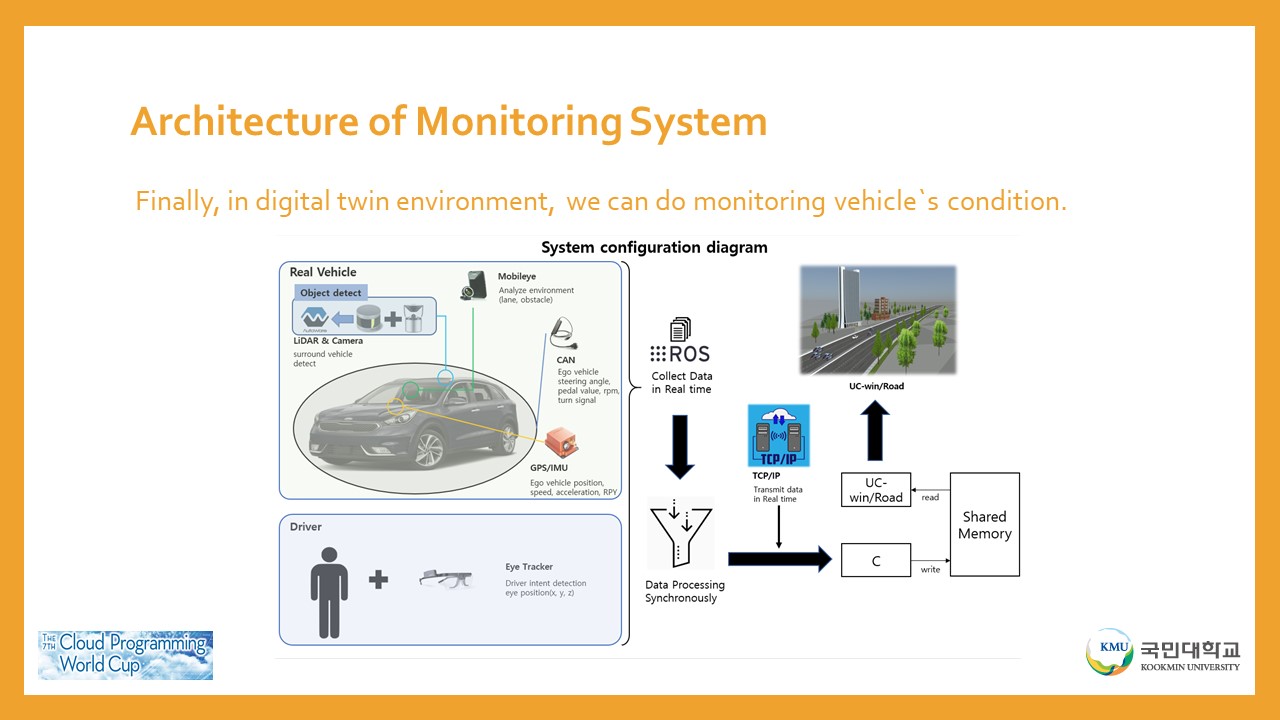
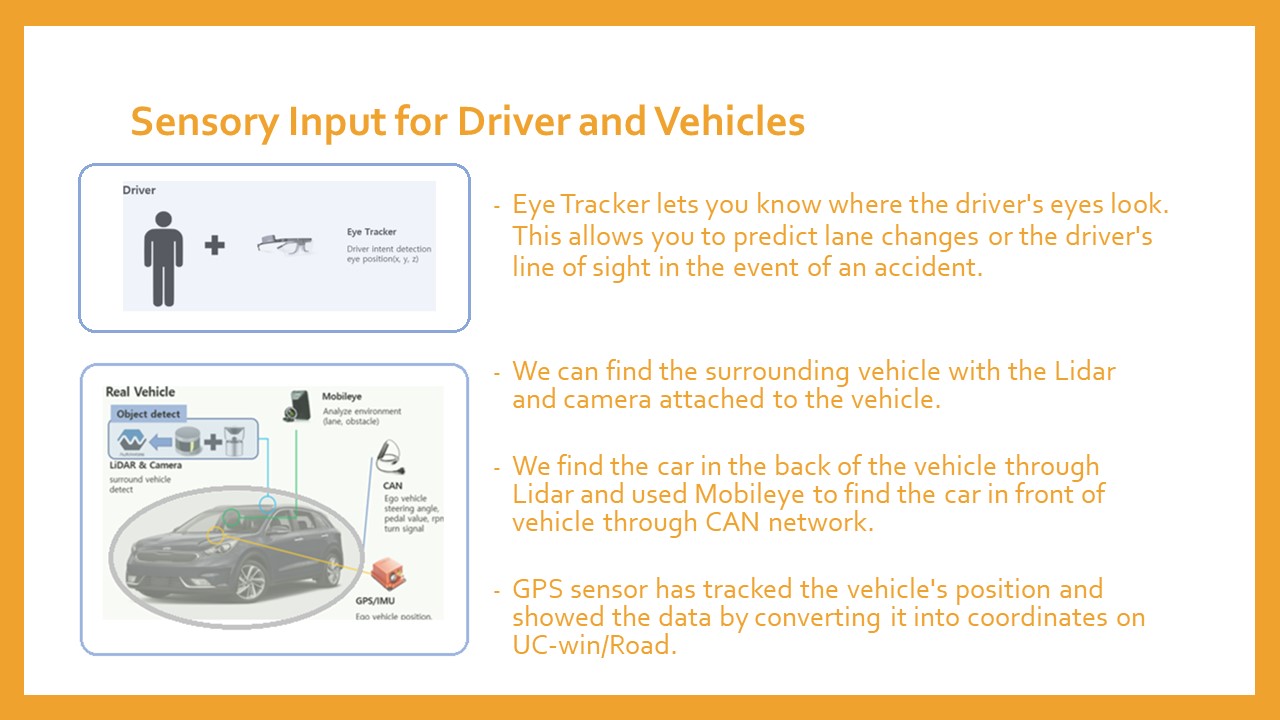
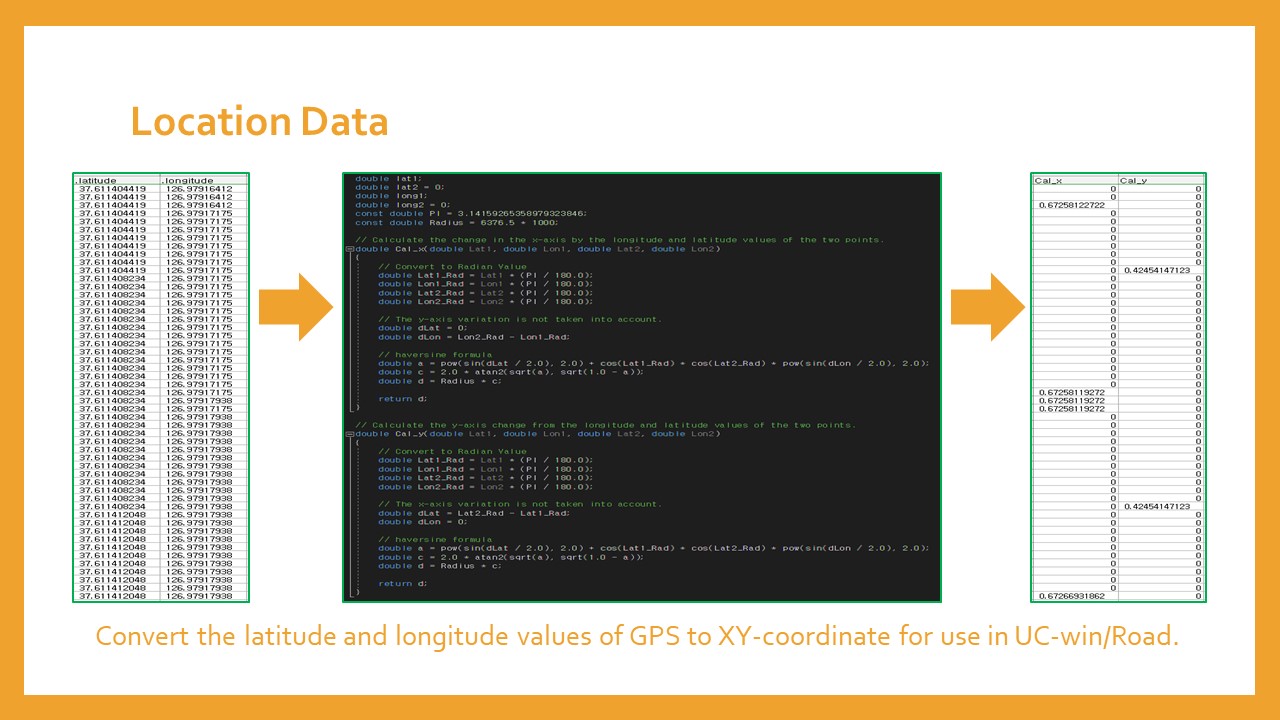
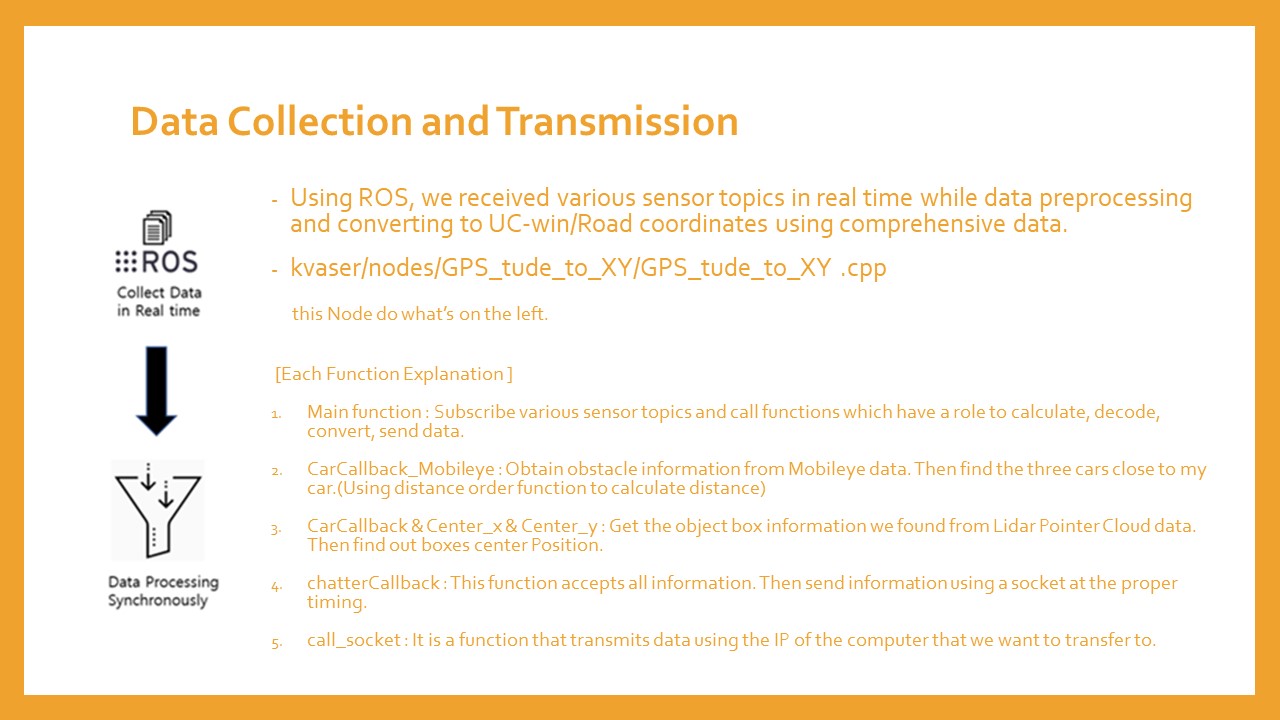
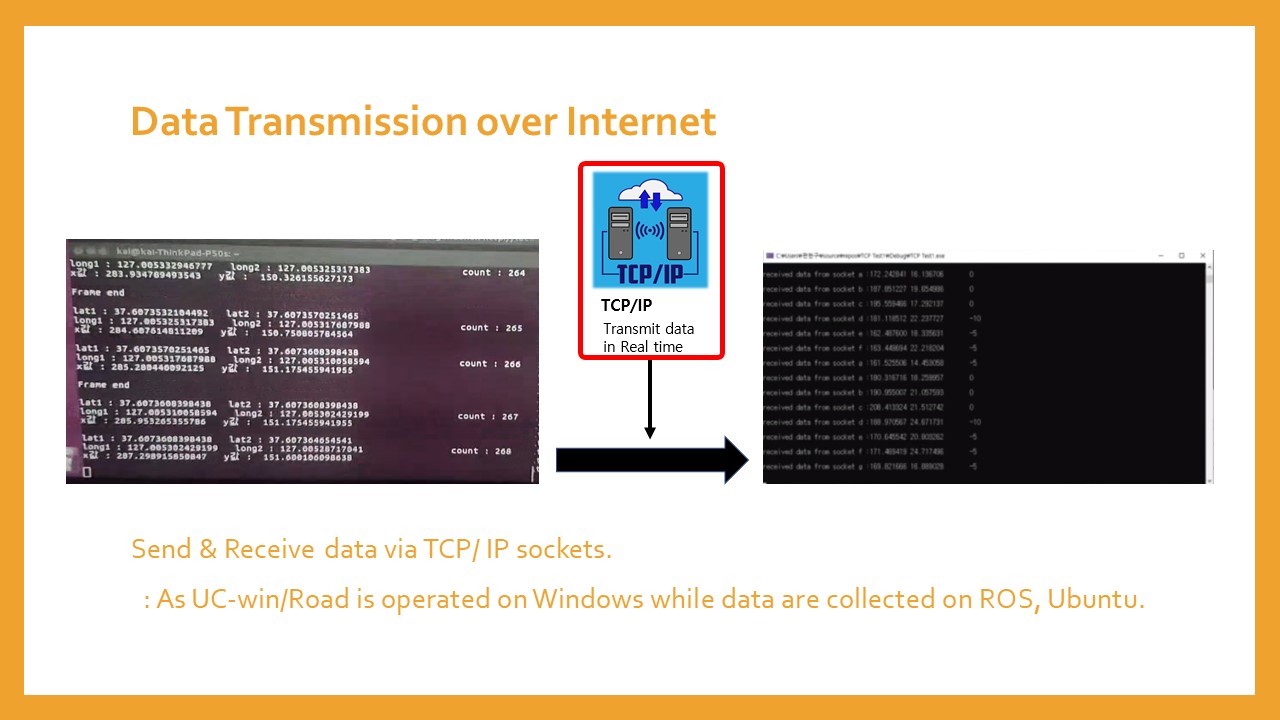
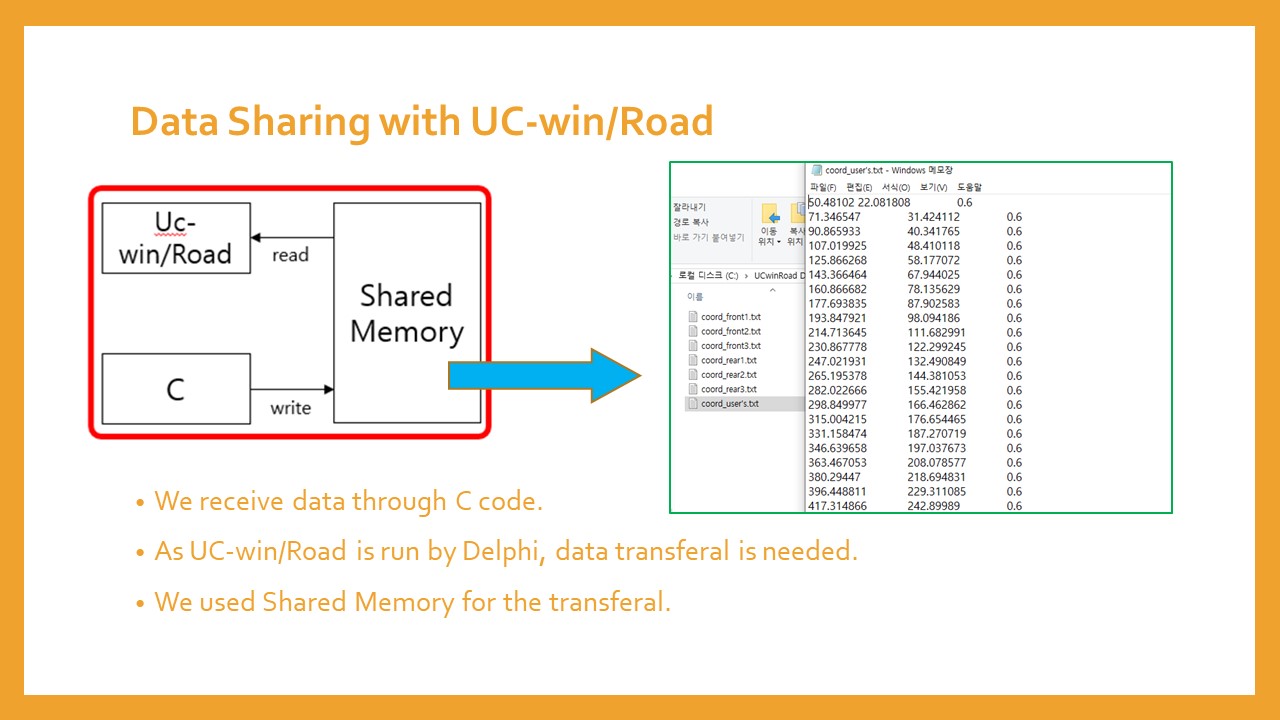
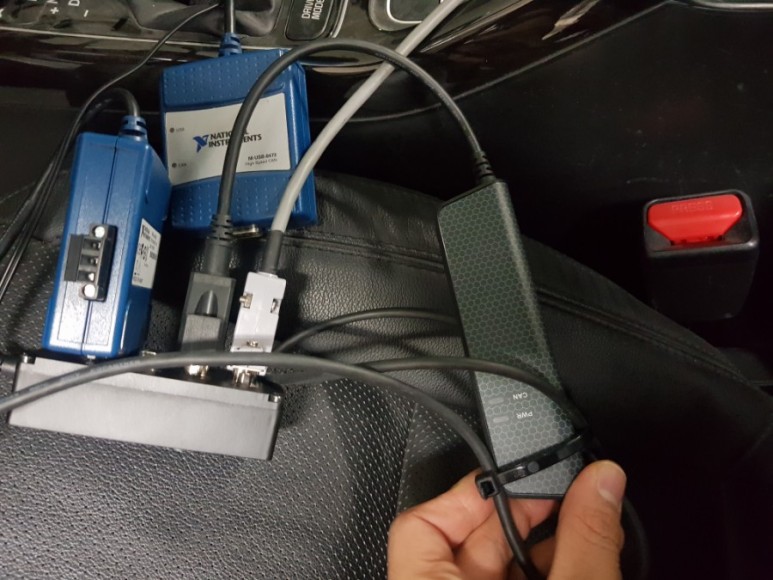
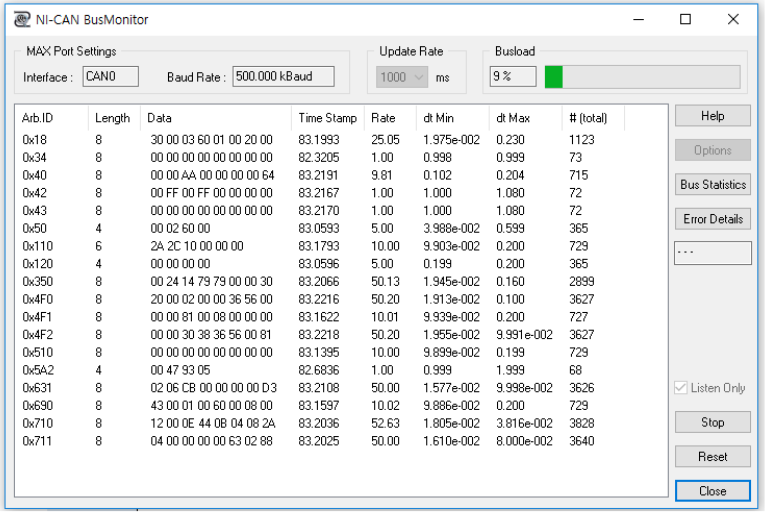
KaAI팀은 송사헌와 송준하 학생(자동차융합대학 3년)을 중심으로 자동차IT융합학과 8명, 자동차공학과 2명으로 구성되어 있으며, 2018년 겨울방학때부터 지금까지 1년동안 ‘Vehicle Monitoring over the Internet toward Digital Twins’라는 프로젝트 주제로 대회를 준비하였다. 이번 대회에서는 라이더, 카메라, GPS, CAN 데이터를 Linux의 ROS를 이용해 수신하고, 가공 및 융합하여 시뮬레이션에 필요한 정보를 얻어내고, 이 정보를 TCP/IP를 이용해 시뮬레이터(UC-win Load)가 있는 Windows 컴퓨터로 전송하여, 실시간으로 운전 중인 차량과 그 차 주변의 차량들을 시뮬레이션 하는 디지털 트윈 세계를 개발, 구현함으로써 심사위원들에게 독창성과 기술의 완성도 부문에서 높은 평가를 이끌어냈다.
지도교수를 맡은 이상헌 국민대 자동차IT융합학과 교수는 “오랜 시간 노력한 학생들에게 고생했다”면서, “운전 중인 차량의 주변 장애물 데이터를 실제 차량에 센서들을 장착해 얻어내고, 이 데이터를 적절하고 훌륭히 이용하여, 자율 주행 완성에 꼭 필요한 통합 관제 센터인 디지털 트윈을 구축했다는 점에서 심사위원들로부터 높은 평가를 받은 것 같다”고 밝혔다.
위 KaAI 팀은 전 전세계 107개국, 680개의 대학, 1470개 팀이 참여한 Valeo Innovation Challenge 2018 대회(프랑스 파리)에서도 총 9개팀이 뽑힌 최종 결선에 진출하였으며, 2018 GM PACE Global Project 경진대회(미국 디트로이트)에서도 국내외 대학 및 본교 자동차운송디자인학과와 융합팀을 구성하여 디자인 부문 1위, 주행 테스트 2위의 성과를 기록한 바 있다.
한편, 국민대 자동차융합대학은 최근 교육부의 ‘4차 산업혁명 혁신 선도대학’ 사업에서 ‘자율주행 자동차’ 과제를 수행하면서 자동차 기술의 융합적 트렌드를 반영한 학제간 융합교육에 앞장서 왔으며, 특히 이상헌 교수는 과거 GM PACE 센터 운영 및 학생지도 경험을 살려 자신의 실험실을 열린 형태의 실험실로 전환시키고 인공지능과 자율주행자동차에 관심을 갖는 많은 학생들이 온라인 중심 자기주도적 학습과 프로젝트 및 경진대회 참여를 통하여 자동차+IT 융합 인력이 육성되는 KaAI School을 개설하여 많은 호응을 얻고 있다. 본 작품을 개발하고 대회를 참여하는데 교육부의 4차 산업혁명 혁신 선도대학 사업과 한국과학창의재단의 학부생 연구 프로그램(URP) 지원 사업의 지원이 있었다.
18년 겨울방학에서 부터 시작한 KaAI활동이 벌써 3개월이 되었습니다. 3개월이라는 시간 동안 동아리 활동에만 몰입했다면, 정말 많은 것을 할 수 있었을 것 같지만, 그렇게 할 순 없었습니다. 개인적인 공부도하고, 방학마지막에 친구들과 여행도 다녀오고, 수강신청등 개강 준비를 하느라, KaAI활동에만 몰입할 수가 없었습니다. 하지만 아주 조금씩 조금씩 준비를 해오다보니 돌이켜보니 좀 많은 것을 했다.. 라는 생각도 듭니다. 지금까지 했던 것을 2가지로 분류 할 수 있을 것같은데, 하나는 동아리를 체계적으로 만들기 위한 노력. 다른 하나는 프로그램 개발을 위한 공부.이렇게 나눌 수 있을 것 같습니다. 이것들을 잠깐 나열해볼까합니다.
1. 동아리를 체계적으로 만들기 위해
이전 게시물에서 말했듯이, 선배도 조교도 없는 거의 동아리 1기로 활동하고 있기 때문에 진짜 동아리의 모습을 갖추기 위해 몇몇 작업들을 했습니다.
①. 소모임 등록하기
학과에 저희 동아리를 등록을 하면, 학교 홈페이지에 저희 동아리가 등록이 됩니다. 또한 동아리 활동비로 가끔 지원금도 나온다고 하고, 앞으로 후배도 지원서와 면접을 통해서 선발할 계획으로 저희 동아리를 확고히 학과 소모임으로 등록을 해놓았습니다. 학과 사무실에서 요구하는 사항이 많아 생각보다 많은 시간을 소모했었습니다.
②. 동아리 시놀로지 구축하기
이전 교수님의 조교 또는 연구생들이 해오던 자료들이 아주 조금 있기는 했습니다. 하지만 연구실 컴퓨터 9대에 중구난방으로 퍼져있었기 때문에, 필요한 자료를 찾기가 힘들었고 아직도 못 찾은 자료도 많습니다. 그래서 저희는 동아리 시놀로지를 구축했습니다. (시놀로지에 관해서는 다음에 더 자세히 다룰 계획입니다. 간단하게 시놀로지란 개인용 혹은 팀 전용 웝하드를 구축하는 기계입니다. 4TB 혹은 그 이상의 용량을 나만의 웹 하드로 가지게 된다는 의미입니다.) 시놀로지는 인터넷과의 연결이 필요하지만, 학교 랜선을 그냥 꼽는다고 학교에서 IP와 인터넷 사용권한을 그냥 제공해 주는 것이 아니기 때문에 이것도 생각보다 많은 시간을 허비했습니다. 하지만, 시놀로지를 구축함으로써 저희 자료를 좀 더 안전하고 간결하게 정리할 수 있어 좋았습니다. 현재는 회의록이나 시설관리문서 등을 저장하는데 사용하고 있습니다.
③. 업무 담당자 선정하기
회장 부회장 총무 학습부장 시설부장 등을 선발했습니다. 저는 부회장을 맡고 있습니다.
④. 팀 분배하고 팀 별 컴퓨터 분배하기
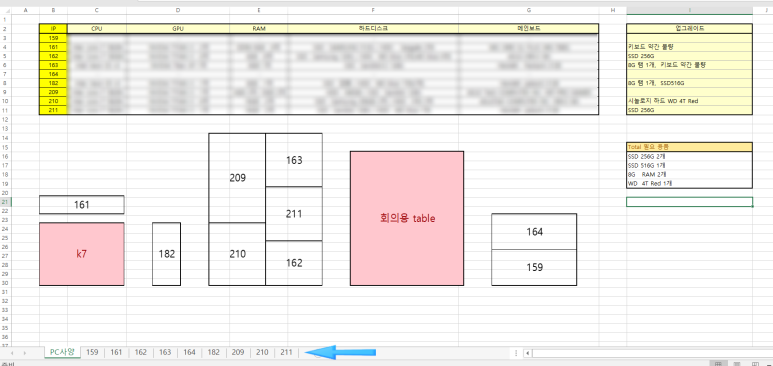
저희 동아리는 크게 4팀으로 나누어집니다. Can Bus, Autoware, Camera, VR_AR. 각 팀당 2~3명의 학생들이 모여 자신이 맡은 분야를 공부하고 개발을 위해 힘씁니다. 현재 10명의 동아리원들이 자신이 하고 싶은 영역을 선택하여 팀 분배를 정확히 하였고, 각팀이 사용할 컴퓨터를 잘 분배하였습니다. 컴퓨터가 9대가 있기 때문에 적절한 분배가 필요했었습니다.
⑤. 연구실 정리하기 (선 정리)
처음 연구실에 왔을 때, 바닥에 먼지는 물론 컴퓨터와 전자장비를 사용하기 때문에, 시설 장비들과 선들이 정말 난잡하게 되어있었습니다. 이것들을 모두 정리하고, 필요없는 것을 버리며 연구실 정리를 했습니다. 별거 아닌 것 같아 보여도, 저와 시설 부장이 2시간 가량 노력하며 연구실 전체 선을 정리하였습니다..ㅠㅠ
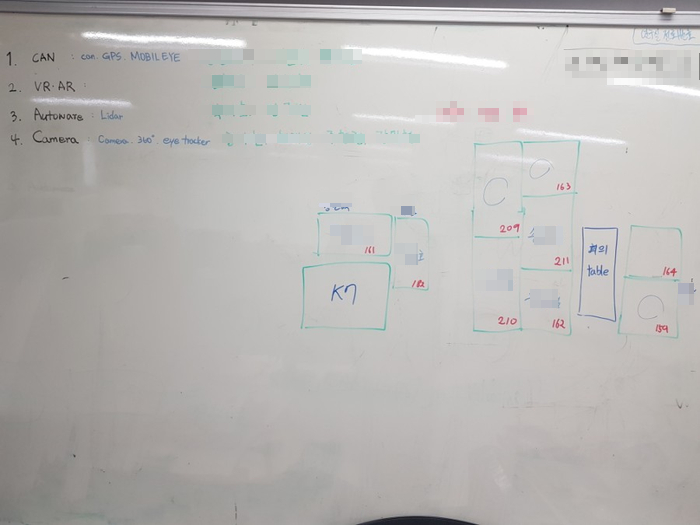
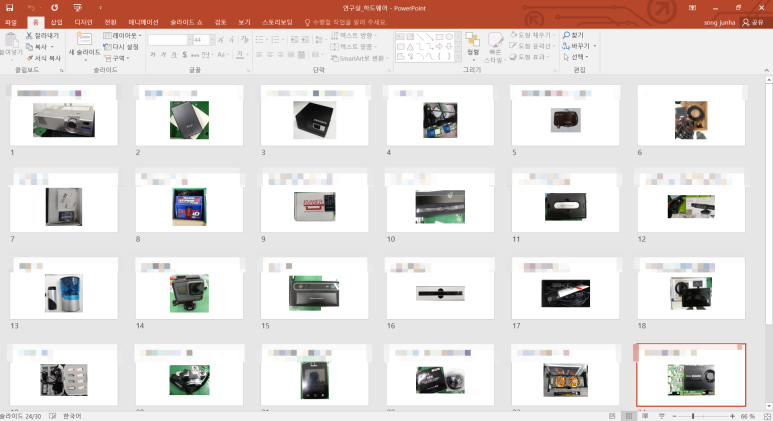
⑥. 연구실 컴퓨터 그리고 장비 조사 하기
연구실에 있는 장비들은 생각보다 고가의 장비입니다. 다 합치면 몇 천 만원 이상이니.. 이러한 장비들을 관리할 필요가 있었습니다. 모든 장비들을 관리하기 위해, 현재 가지고 있는 개수를 모조리 조사 했습니다. 컴퓨터 내부를 모두 확인하고, 이리저리 나 돌아다니는 장비들을 한 곳아 몰아 정리하며 개수 조사를 하는 작업도 역시나 쉽지 않았습니다. 이 작업은 동아리 멤버들 모두와 함께 했는데, 그래서 그런지 대략 5시간 정도만에 모든 조사를 끝낼 수 있었습니다.
2. 위의 작업들을 하면서 배우고 깨달은 점..
저의 블로그에 ‘ 소개 ‘ 카테고리 글들을 보시면 아시겠지만, 저는 지금까지 학점을 얻은 것에 많은 집중을 했었습니다. 항상 다른 학생들보다 더 많이 공부하려고 했고, 더 많이 알기 위해 노력했습니다. 누구에게 뒤쳐진다는 생각이 너무 너무 싫어서 그랬던 것 같습니다. 좋은 학점을 받기 위해서, 혼자 공부하는 시간이 대부분이었습니다. 친구에게 모르는 것을 물어볼 생각도 하지 않았고, 모르는 것은 스스로 해결하거나 교수님께 여쭤봤습니다. 방학 또한 공부를 할 때, 항상 도서관에서 혼자 공부하는 것이 당연했습니다. 그리고 학교에서 팀플을 할 때면, 항상 ‘그래 내가 다 해버리지’ 라는 생각이 대부분이었습니다. 내가 다 해버린다면 비록 내가 몸은 힘들지라도, 마음은 편하고 학점은 보장된다.. 라고 생각했기 때문이었습니다.
팀은 서로의 부족한 부분을 상호보안 해준다.
해야 할 것은 너무 많다.
내가 다 해버리고 싶어도 그렇게 못한다.
팀원을 믿고 의지하며,
일을 전적으로 맡기는 자세도 가져야한다.
성취하고 싶은 것이 크면 클수록,
나혼자서 해내기가 힘들어진다.
동아리를 시작하고 나서, 동아리를 체계적으로 만들기 위해 노력을 하다보니, 해야할 것이 정말 많았고, 혼자서는 전부 해결할 수 없었던 것들이었습니다. 위와 같은 생각을 오래 가지고 있던 저는, 그냥 내가 다 해버리면 맘편한데.. 라는 생각을 하기도 했습니다. 하지만 해야할 것이 너무 많고 혼자 다 하려면 너무 많은 시간이 걸린다는 것을 금방 깨달았습니다. 거의.. 처음으로, 팀원들인 친구들에게, 제가 생각했던 동아리를 위해 해야 할 일들을 전적으로 믿고 의지하며 일을 부탁했었습니다. 가끔은 마음에 안드는 부분이 보여서 약간은 답답하긴 했지만, 그래도 믿고 맡겼습니다. 지금 돌이켜 생각해보니, 팀원과 같이 해서 많은 것을 빨리 끝낼 수 있었다는 생각이 듭니다. 또 가끔 제가 부족한 부분, 잘 모르는 부분을 저의 팀원이 더 잘하는 경우가 있었습니다. ( 엑셀을 저보다 잘다루는 팀원, 컴퓨터 하드웨어를 저보다 더 잘아는 팀원 등..) 이런 경우들을 통해서 새로운 것을 배우고 깨달을 수 있었습니다. 이렇게 배운 모든 것들을 위에 간단한 문장으로 적어 놓은 것입니다.
저는 현재 국민대학교 자율주행자동차 연구 동아리 KaAI(Kookmin Automotive Artificial Intelligence)에서 회장을 맡고 있습니다. 이전 게시글에 저의 KaAI 지원에 대한 내용을 적었습니다. 이번 글에서 KaAI의 간략한 소개를 잠시 적어볼까합니다. 혹시나 나중에, 저희 동아리에 관심이 있는 학생이 생긴다면, 이 글이 도움이 되면 좋겠습니다.
목차는 아래와 같습니다.
1. KaAI 는 어떤 동아리인가 ( 모집 공고 인용 )
2. KaAI 2기
3. KaAI 활동에 대해서
4. 19년 3월까지의 동아리 상황
5. 동아리 시설 사진
1. KaAI 는 어떤 동아리인가. ( 모집 공고 인용 )
※ 아래의 내용은 모집 공고를 인용한 글입니다.
KaAI는 Kookmin Automotive Artificial Intelligence (Auto AI)의 약자로 자동차 인공지능에 대해서 연구하는 모임입니다. 제4차 산업혁명의 핵심 분야인 인공지능을 자율주행자동차에 응용하는 것에 대한 목표로 기초 지식을 쌓고 이와 관련된 국내외 대회에 출전하여 소프트웨어 개발 역량을 쌓고 향후 진로를 개척해 나가는 것이 목표입니다.
2. KaAI 2기
※ 아래 내용은 저의 개인적인 의견이므로, 동아리 맴버들은 다른 의견을 가질 수도 있습니다.
위의 내용에서도 확인할 수 있는 것처럼, 저의 동아리는 많은 수상실적을 가지고 있습니다. 하지만… 지금 2019년에 활동하는 저희 맴버가 KaAI 2기입니다. 이전 수상실적들은 KaAI 동아리 선배들이 한것이 아니라, 교수님 연구실에 있던학생들이 수상했던 수상경력입니다. 따라서 대회를 준비했던 내용들이, 제대로 인수인계된것이 없습니다. KaAI 1기 선배들도 동아리라는 개념으로 활동하신것이 아닌 것이기때문에, 인수인계자료를 준비하셨거나, 현재 동아리에서 활동 중이시지도 않습니다. 대부분 졸업을 하셨거나 취직을 하셔서, 사실상 저희는 궁긍한게 생기면 물어볼 선배가 있지는 않습니다. 이름만 2기지, 학교에 소모임을 등록하고 동아리를 위해 연구실을 청소하고 시설 관리하고 컴퓨터와 장비를 배치하고 관리장부만들고 선정리하는 모든 것들을 저희 멤버부터 시작했다고 볼 수 있습니다. 활동을 시작한지 3개월이 됐지만, 준비하고 더 많은 시간을 들였고, 사실상 거의 지금부터 공부하고 연구를 하려고 하기 때문에 저희도 모르는 것이 정말 많습니다. 2019년 3월 현재의 동아리 상황이 이랬다는 것을 후배분들이 알아주셨으면 하고 적어놓습니다.
3. KaAI 활동에 대해서
KaAI에서 활동하고 공부하는 내용들은 목차1들의 내용들이 대부분 맞습니다. 하지만 제가 당부하고 싶은, 후배분들이 알아두셔야 할 점이 2가지 있습니다. 하나, 누군가 챙겨주지 않습니다. 스스로 찾아보고 공부하고 준비해야합니다. 둘, KaAI라는 동아리는 친목과 노는 동아리가 아닙니다. 학부 연구생 수준으로 공부하고 활동할 것을 각오해야합니다.
\1. 목차2에서 적어 놓은 것처럼, 많은 인수인계사항이 없습니다. 따라서 무엇을 공부해야하고 무슨 책을 봐야하고 어떻게 공부해야하는지는 스스로 찾아보고 스스로 결정하고 스스로 공부해야합니다. 물론 교수님과 저희 2기 맴버들이 간단한 조언을 해줄 수는 있지만, 그 것도 초만에만이지, 나중에 심화된 실전에 들어와 준비를 하게 된다면 스스로 찾아보고 공부해야 하는 내용들이 많을 것입니다. 국민대학교 대표 자동차동아리인 코라나 커스트는 선배들과 많은 실적과 대회준비내용들이 축적되어있기 때문에, 선배들이 시키는 것 그리고 선배들이 준비했던 것을 따라가기만 하면되는 장점이 있습니다. 하지만 KaAI는 그 반대이기때문에 이것이 단점이 될 순있지만 반대로 장점이 될 수도 있습니다. 어떤 커리큘럼에 강요되지 않고, 내가 하고 싶은 공부를 내가 스스로 찾아서 공부할 수 있다고 생각한다면 큰 장점일 수 있습니다
\2. 동아리 활동을 시작한지 3개월이 넘었지만, 맴버들과 술을 먹거나 회식을 하거나 놀러간적이 한번도 없습니다..ㅎㅎㅎ개강을 이제 했으니, 며칠 안으로 회식을 한 번 할 것같기는 하지만, 이 정도로 저희 동아리는 취미생활이자 친목을 위한 동아리라기 보다는 열심히 공부하며, 대회를 지지하게 준비하는 동아리 느낌이 더 강합니다. 공부하는 내용들에 대한 수준도 상당히 높기 때문에 학부생 수준이 아닌 대학원수준까지의 내용들을 공부하러 온다는 느낌으로 각오하고 오시는 것이 좋을 것 같습니다.
4. 19년 3월까지의 동아리 상황
이전 게시물과 2번목차에서도 확인하실 수있는 것처럼, 지금까지 동아리를 준비하느라 바빴습니다. 동아리의 체계를 잡아가고 정말 기초적인 지식들을 습득하는데 지금까지의 시간을 투자했습니다. 이제 막 공부 시작하려고 하는데, 대회를 위해 준비해야할 내용들이 100이라면, 지금까지의 저희는 5%정도 밖에 이해하지 못했다.. 라고 말씀드리고 싶습니다. 대회가 4~6개월 정도 남았는데, 학교를 다니면서 전공 공부를 하면서, 연구실 활동을 잘 해내 갈 수 있을지 사실은 저도 걱정이 큽니다.ㅎㅎㅎ하지만 모든 맴버들이 잘 준비한다면 언젠간 좋은 결과를 얻을 수 있을 거라 믿습니다. 지금까지 공부하고 배운내용들은 이와 같습니다. 리눅스 우분투, ROS, Autoware, RealSense와 Lider와 같은 자율주행에 필요한 센서 및 각종 하드웨어, 머신러닝과 딥러닝 이론, 딥러닝 라이브러리 텐서플로우와 케라스, 파이썬과 아나콘다 라이브러리, C언어와 C++. 정말 많은 내용을 공부한 것 같지만 모두 수박 겉 핥기 느낌으로 보고 배운 것이기 때문에 아직은 답답하고 준비가 덜 된 느낌이 크네요..ㅎㅎㅎ