【Digital-Twin】 동아리의 4개의 팀/ 나의 팀 CAN/ 현재 준비 모습들..
국민대 자율주행 자동차 동아리 KaAI에서의 활동 내용들을 올려봅니다.
저희 동아리는 대략 10명의 팀원이 있습니다.
그리고 이 팀원들은 4개의 팀으로 쪼개져서 각자 맡은 일을 충실히 하고 있습니다.
4개의 팀은 Can Autoware Uc-winLoad Camera가 있어요.
저는 그 중에서 Can을 맡고 있습니다. 각각의 팀이 하는 일을 간단하게 말씀해드리겠습니다.
Can : 실제 자동차에 있는 수 많은 도선들은 단순히 전기를 전달하기 위한 전선도 있지만, 신호를 주고 받기 위한
도선도 많습니다. 도선으로 부터 나오는 신호들을 강제로 뽑아내어 자동차에서 어떤 신호가 돌아다니는지,
파악하고, 그런 신호들을 내가 원하는 설정으로 변경해보기도 합니다. 예를 들어 좌측 깜빡이를 키면
좌측 깜빡이가 켜지는 것이 아닌, 스피커 음량이 커지게 만들 수도 있습니다.
Autoware : 모든 센서 데이터를 모두 모아, 자율 주행을 스스로 구현하는 프로그램 입니다.
내가 가지고 있는 데이터(지도/ 라이더 카메라 센서)등을 모두 대입해주면, 자율 판단과 자율주행을
해주는 알고리즘이 있는 프로그램입니다.
Uc-winLoad : 가상 환경에서 (Simulation) 차를 운전합니다. 실제 외부 환경보다 자율 주행 구현이
조금 더 쉽고, 내가 원하는 상황을 즉각적으로 만들 수 있어서 편리합니다.
Camera : RealSense나 스테레오 카메라등의 센서를 다루는데 집중합니다.
이 카메라들은 Depth카메라로써 깊이까지(물체와의 거리) 측정이 가능합니다.
저는 현재 Can 팀의 팀장을 맡고 있습니다.
실험실에 있는 K7의 데이터를, NI 또는 Kvaser제품을 사용해서 가져옵니다.
이로부터 얻을 수 있는 데이터는 정말 많습니다.
예를 들어, 엑셀, 브레이크의 밟은 각도, 깜빡이의 켜짐, 자동차의 속도, 가속도 상태 등의
모든 데이터를 차량에서 컴퓨터로 가져올 수 있습니다.
현재 최선을 다해서 준비를 하고 있지만,
에러도 많고, 막히는 것도 많고, 막막한 것도 많습니다…
하지만 계속 준비하다보면 분명 좋은 결과가 있을거라 생각합니다.
앞으로 최선을 다해 준비해서, 좋은 결과나 재미있는 결과가 있다면 또 올리도록 하겠습니다.
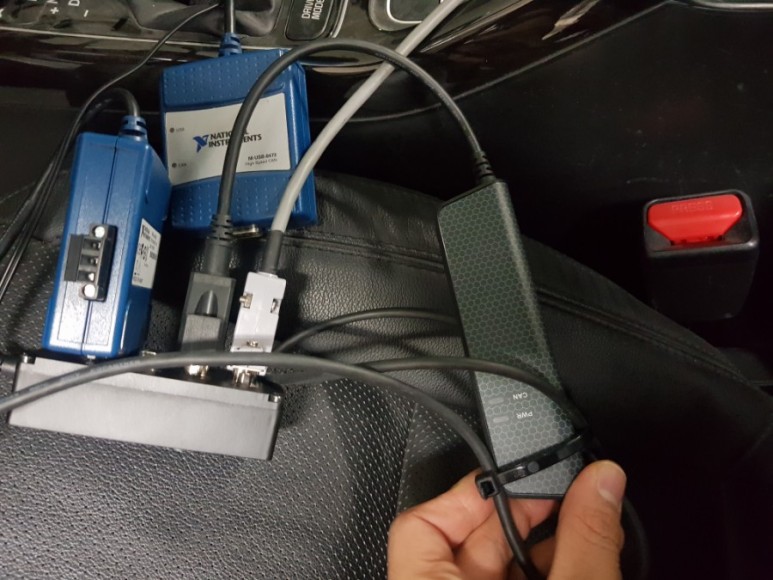
왼쪽이 NI CAN, 오른쪽이 Kvaser CAN
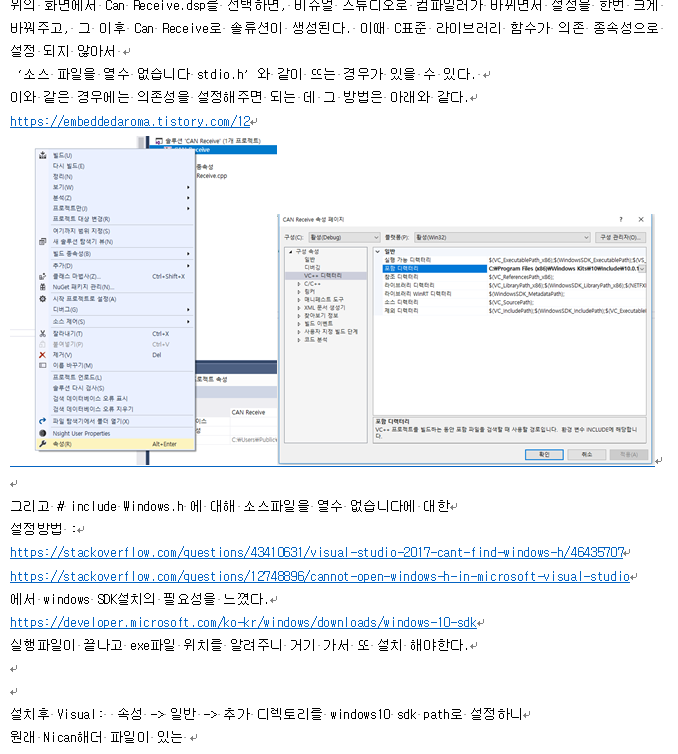
오류나 현재 과정을 정리하는 보고서 중 일부
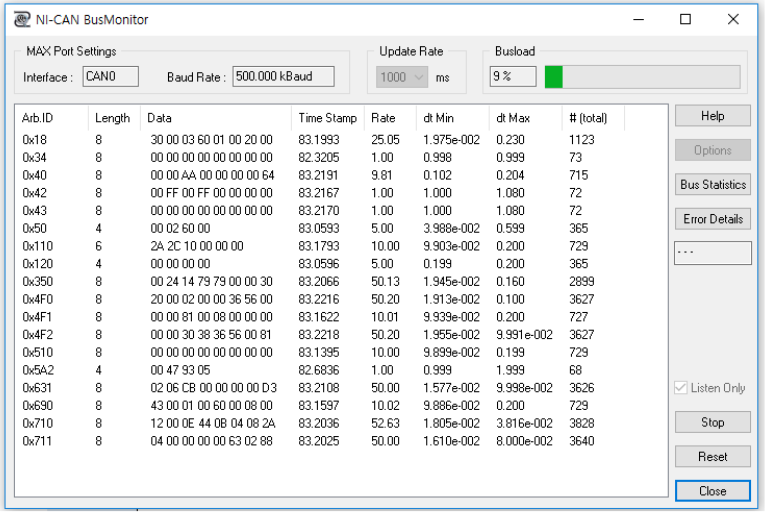
실재 CAN을 통해서 데이터를 받아오는 시각적 데이터. 각 데이터들은 16진수 2개 1바이트로 표현됨을 볼수 있다
