【CV】Computer Vision at FastCampus2, chap7~10
- FastCampus 사이트의 Computer vision 강의 내용 정리
- 구글링을 해도 되지만은, 필요하면 강의를 찾아서 듣기
- FastCampus - Computer vision Lecture
- 이전 Post Link
chap7 - Binary
cv2.threshold(src, thresh, maxval, type, dst=None) -> retval(사용된 임계값), dst
Otsu 방법
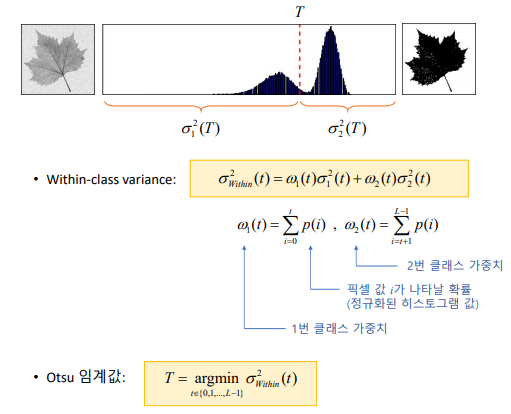
th, dst = cv2.threshold(src, 0, 255, cv2.THRESH_BINARY cv2.THRESH_OTSU)
균일하지 않은 조명 환경 - 픽셀 주변에 작은 윈도우를 설정하여 지역 이진화 수행
for y in range(4): for x in range(4): src_ = src[y*bh:(y+1)*bh, x*bw:(x+1)*bw] dst_ = dst2[y*bh:(y+1)*bh, x*bw:(x+1)*bw] cv2.threshold(src_, 0, 255, cv2.THRESH_BINARY|cv2.THRESH_OTSU, dst_)- cv2.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize(슬라이딩 윈도우의 크기), C, dst=None) -> dst
모폴로지(Morphology, 침식과 팽창)
침식 연산 : 영역이 줄어듦. 잡음 제거 효과 - cv2.erode(src, kernel)
팽창 연산 : 영역이 불어남. 구멍이 채워짐 - cv2.dilate(src, kernel)
kernerl 생성 방법 : cv2.getStructuringElement
src = cv2.imread('circuit.bmp', cv2.IMREAD_GRAYSCALE) se = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 3)) dst1 = cv2.erode(src, se) dst2 = cv2.dilate(src, None)
모폴로지(열기와 닫기)
- 열기 : 침식 -> 팽창
- 닫기 : 팽창 -> 침식

- 범용 모폴로지 연산 함수 : cv2.morphologyEx(src, op, kernel)
- 열기 연산을 이용한 잡음 제거 : 우선은 지역 이진화!! 필수 -> 그리고 열기 연산
레이블링
- 객체 분활 클러스터링(Connected Component Labeling / Contour Tracing)
- 4-neightbor connectivity / 8-neightbor connectivity
- 레이블링 함수 : cv2.connectedComponents(image)
- 객체 정보 함께 반환하는 레이블링 함수 : cv2.connectedComponentsWithStats(image)
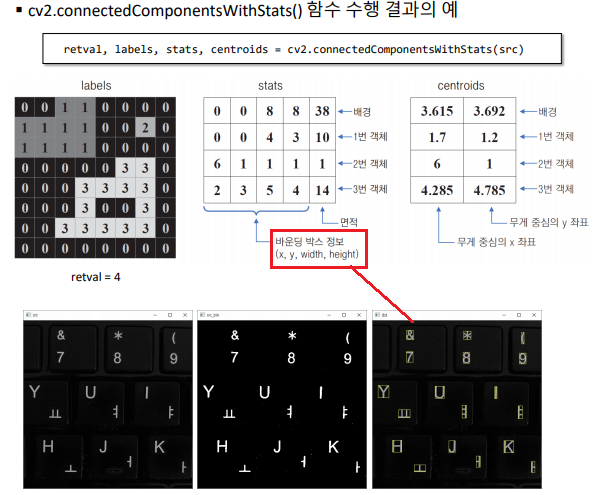
- 바운딩 박스 정보가 나오므로, 숫자 검출 같은 행위가 가능해 진다.
외곽선 검출( Boundary tracking. Contour tracing)
cv2.findContours(image, mode, method)
cv2.drawContours(image, contours, contourIdx, color) : 외각 선만 그려줌 (내부x)
src = cv2.imread('contours.bmp', cv2.IMREAD_GRAYSCALE) #contours, hier = cv2.findContours(src, cv2.RETR_TREE, cv2.CHAIN_APPROX_NONE) contours, hier = cv2.findContours(src, cv2.RETR_CCOMP, cv2.CHAIN_APPROX_NONE) dst = cv2.cvtColor(src, cv2.COLOR_GRAY2BGR) idx = 0 while idx >= 0: c = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255)) cv2.drawContours(dst, contours, idx, c, 2, cv2.LINE_8, hier) idx = hier[0, idx, 0]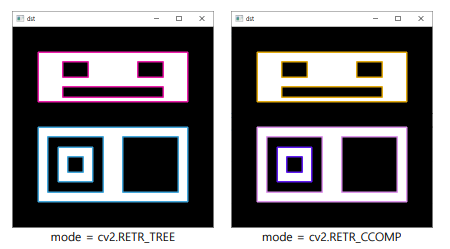
외각선 검출 및 도형의 크기나 특징 정보 반환하는 함수
함수 이름 설명 cv2.arcLength() 외곽선 길이를 반환 cv2.contourArea() 외곽선이 감싸는 영역의 면적을 반환 cv2.boundingRect() 주어진 점을 감싸는 최소 크기 사각형(바운딩 박스) 반환 cv2.minEnclosingCircle() 주어진 점을 감싸는 최소 크기 원을 반환 cv2.minAreaRect() 주어진 점을 감싸는 최소 크기 회전된 사각형을 반환 cv2.minEnclosingTriangle() 주어진 점을 감싸는 최소 크기 삼각형을 반환 cv2.approxPolyDP() 외곽선을 근사화(단순화) - 아래 실습에서 사용 예정 cv2.fitEllipse() 주어진 점에 적합한 타원을 반환 cv2.fitLine() 주어진 점에 적합한 직선을 반환 cv2.isContourConvex() 컨벡스인지를 검사 cv2.convexHull() 주어진 점으로부터 컨벡스 헐을 반환 cv2.convexityDefects() 주어진 점과 컨벡스 헐로부터 컨벡스 디펙트를 반환
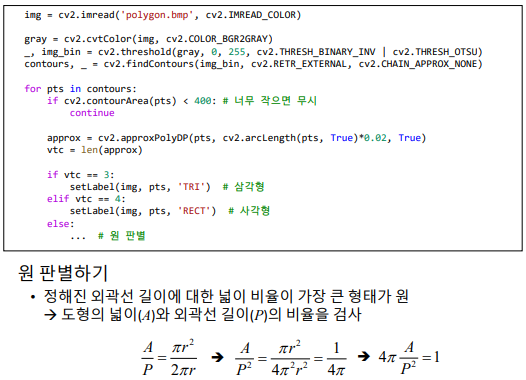
다각형 검출 프로그램 실습하기
- 구현 순서
- 이진화
- contour
- 외각선 근사화
- 너무 작은 객체, 컨벡스가 아닌 개체 제외
- 꼭지점 개수 확인 (사각형, 삼각형, 원 검출)
- 구현 순서
실전 코딩 : 명함 인식 프로그램 만들기
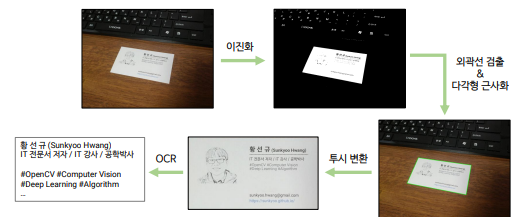
코드 핵심 요약
import sys import numpy as np import cv2 import pytesseract # 입력 영상 전처리 src_gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY) _, src_bin = cv2.threshold(src_gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU) # 외곽선 검출 및 명함 검출 contours, _ = cv2.findContours(src_bin, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) for pts in contours: # 외곽선 근사화 approx = cv2.approxPolyDP(pts, cv2.arcLength(pts, True)*0.02, True) # 컨벡스가 아니고, 사각형이 아니면 무시 if not cv2.isContourConvex(approx) or len(approx) != 4: continue cv2.polylines(cpy, [approx], True, (0, 255, 0), 2, cv2.LINE_AA) pers = cv2.getPerspectiveTransform(srcQuad, dstQuad) dst = cv2.warpPerspective(src, pers, (dw, dh)) dst_gray = cv2.cvtColor(dst, cv2.COLOR_BGR2GRAY) print( pytesseract.image_to_string(dst_gray, lang='Hangul+eng') )Tesseract(광학 문자 인식(OCR) 라이브러리)
- 2006년부터 구글(Google)에서 관리. 현재는 2018년 이후 LSTM 기반 OCR 엔진 및 모델 추가.
- 하지만 우리는 github 그대로 사용하지 않을 것. 이미 빌드된 실행 파일 사용할 것
- https://github.com/UB-Mannheim/tesseract/wiki
- tesseract/tesseract-ocr-w64-setup-v5.0.0-alpha.20200328.exe 다운 및 설치
- 설치 옵션 및 설정 (이해 안되면 동영상 참고 하기)
- 설치 시 “Additional script data” 항목에서 “Hangul Script”, “Hangul vertical script” 항목 체크, “Additional language data” 항목에서 “Korean” 항목 체크
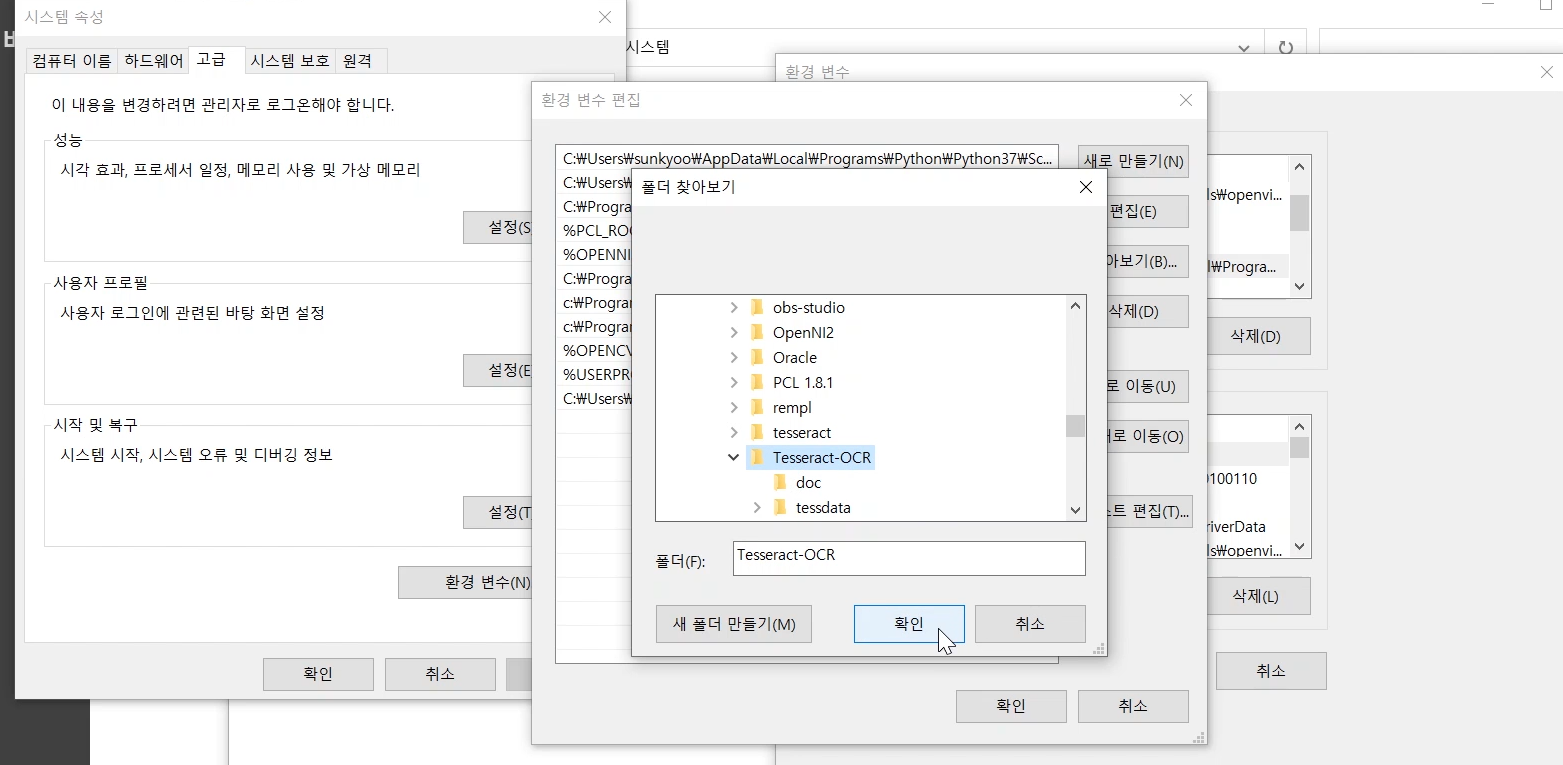
- 설치 후 시스템 환경변수 PATH에 Tesseract 설치 폴더 추가 (e.g.) c:\Program Files\Tesseract-OCR
- (안해도 됨) 설치 후 시스템 환경변수에 TESSDATA_PREFIX를 추가하고, 변수 값을 \tessdata 로 설정
- \tessdata\script\ 폴더에 있는 Hangul.traineddata, Hangul_vert.traineddata 파일을 \tessdata\ 폴더로 복사
- 그리고$ pip install pytesseract
- python : pytesseract.image_to_string(dst_gray(np.array, gray, RGB도 가능, BGR 불가), lang=’Hangul+eng’)
- 그리고 가능하면, CMD에서 (path가 지정되어 있으므로) python namecard.py 로 실행하기
chap8 - Segmentation & Detection
그랩컷 영상분할
- 그래프 알고리즘을 이용해서 Segmentation을 수행하는 알고리즘 (정확한 알고리즘은 논문 참조)
- cv2.grabCut(img, mask, rect)
mask2 = np.where((mask == 0) | (mask == 2), 0, 1).astype(‘uint8’)
dst = src * mask2[:, :, np.newaxis] - 마우스를 활용한 그랩컷 영상 분할 예제 : grabcut2.py 크게 어렵지 않음
모멘트 기반 (비슷한 모양 찾기 기법을 이용한) 내가 찾고자 하는 객체 검출

- Hu’s seven invariant moments : 크기, 회전, 이동, 대칭 변환에 불변
- 모양 비교 함수: cv2.matchShapes(contour1, contour2, method, parameter) -> 영상 사이의 거리(distance)
템플릿 매칭
입력영상에서 작은 크기의 템플릿과 일치하는 부분 찾는 기법
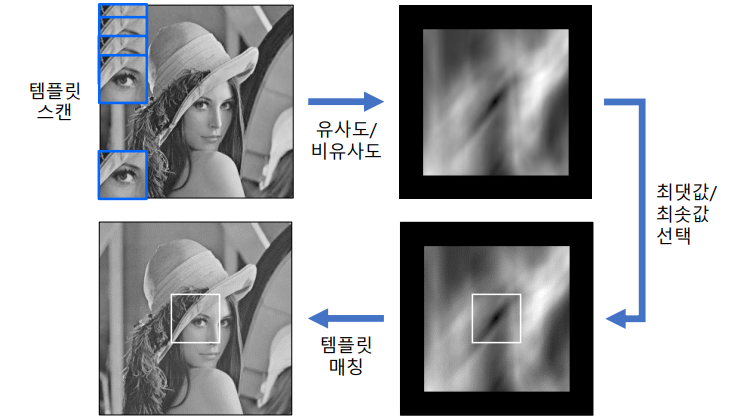
cv2.matchTemplate(image, templ, method, result=None, mask=None) -> result
image의 크기가 W x H 이고, templ의 크기가 w x h 이면 result 크기는 (W - w + 1) x (H - h +1)method 부분에 들어가야할, distance 구하는 수식은 강의 및 강의 자료 참조
res = cv2.matchTemplate(src, templ, cv2.TM_CCOEFF_NORMED) res_norm = cv2.normalize(res, None, 0, 255, cv2.NORM_MINMAX, cv2.CV_8U) _, maxv, _, maxloc = cv2.minMaxLoc(res)
템플릿 매칭 (2) - 인쇄체 숫자 인식
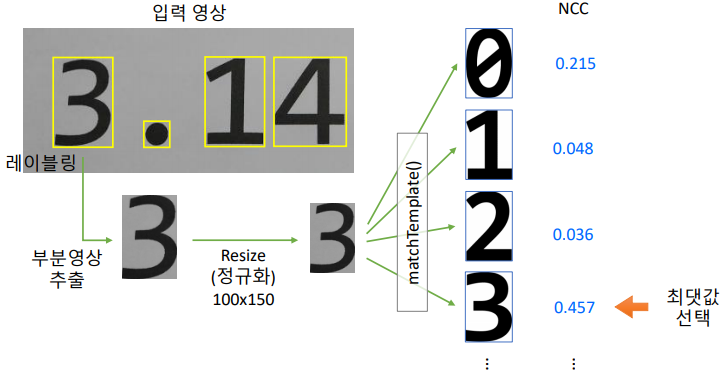
- 오른쪽의 0~9까지는 미리 파일로 저장해놓음
- 자세한 코드 사항은 강의 및 digitrec.py파일 참조
캐스케이드 분류기: 얼굴 검출
Viola - Jones 얼굴 검출기 (이것도 머신러닝 기반)
- 유사 하르 특징(Haar-like features)
cv2.CascadeClassifier.detectMultiScale(image)
src = cv2.imread('lenna.bmp') classifier = cv2.CascadeClassifier() classifier.load('haarcascade_frontalface_alt2.xml') faces = classifier.detectMultiScale(src) for (x, y, w, h) in faces: face_img = src[y:y+h, x:x+w] cv2.rectangle(src, (x, y, w, y), (255, 0, 255), 2)
HOG 보행자 검출
Histogram of Oriented Gradients, 지역적 그래디언트 방향 정보를 특징 벡터로 사용. SIFT에서의 방법을 최적화하여 아주 잘 사용한 방법
2005년부터 한동안 가장 좋은 방법으로, 다양한 객체 인식에서 활용되었다.

- 9개 : 180도를 20도 단위로 나눠서 9개 단위로 gradient 분류
- 1개 셀 8x8, 1개 블록 16 x 16. 블록 1개 는 36개(4블록 x 9개 Gradient)의 히스토그램 정보를 가짐
cv2.HOGDescriptor.detectMultiScale(img)
hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector())cap = cv2.VideoCapture('vtest.avi') hog = cv2.HOGDescriptor() hog.setSVMDetector(cv2.HOGDescriptor_getDefaultPeopleDetector()) while True: ret, frame = cap.read() detected, _ = hog.detectMultiScale(frame) for (x, y, w, h) in detected: c = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255)) cv2.rectangle(frame, (x, y), (x + w, y + h), c, 3)
실전 코딩: 간단 스노우앱
구현 기능
- 카메라 입력 영상에서 얼굴&눈 검출하기 (캐스케이드 분류기 사용)
- 눈 위치와 맞게 투명한 PNG 파일 합성하기
- 합성된 결과를 동영상으로 저장하기
ch8/snowapp.py 파일 참조
face_classifier = cv2.CascadeClassifier('haarcascade_frontalface_alt2.xml') eye_classifier = cv2.CascadeClassifier('haarcascade_eye.xml') faces = face_classifier.detectMultiScale(frame, scaleFactor=1.2, minSize=(100, 100), maxSize=(400, 400)) for (x, y, w, h) in faces: eyes = eye_classifier.detectMultiScale(faceROI) overlay(frame, glasses2, pos) def overlay(img, glasses, pos): # 부분 영상 참조. img1: 입력 영상의 부분 영상, img2: 안경 영상의 부분 영상 img1 = img[sy:ey, sx:ex] # shape=(h, w, 3) img2 = glasses[:, :, 0:3] # shape=(h, w, 3) alpha = 1. - (glasses[:, :, 3] / 255.) # shape=(h, w) # BGR 채널별로 두 부분 영상의 가중합 img1[..., 0] = (img1[..., 0] * alpha + img2[..., 0] * (1. - alpha)).astype(np.uint8) img1[..., 1] = (img1[..., 1] * alpha + img2[..., 1] * (1. - alpha)).astype(np.uint8) img1[..., 2] = (img1[..., 2] * alpha + img2[..., 2] * (1. - alpha)).astype(np.uint8)
9. 특징점 검출과 매칭
코너 검출
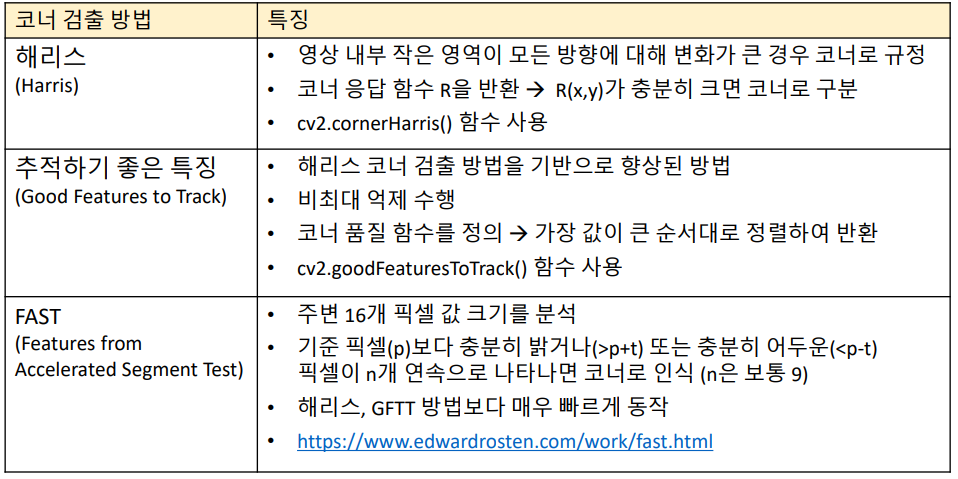
- cv2.cornerHarris(src, blockSize, ksize, k)
- cv2.goodFeaturesToTrack(image, maxCorners, qualityLevel, minDistance)
- cv2.FastFeatureDetector_create(, threshold=None, nonmaxSuppression=None, type=None)
cv2.FastFeatureDetector.detect(image) -> keypoints - 예제 및 사용법은 강의 자료 참조
특징점 검출 (local 영역만의 특징(Discriptor )을 가지는 곳을 특징점 이라고 한다.)
- SIFT, KAZE, AKAZE, ORB
- 아래의 방법들을 사용해서 feature 객체 생성
- cv2.KAZE_create(, …) -> retval
- cv2.AKAZE_create(, …) -> retval
- cv2.ORB_create(, …) -> retval
- cv2.xfeatures2d.SIFT_create(, …) -> retval
- feature.detect(image, mask=None) -> keypoints
- cv2.drawKeypoints(image, keypoints, outImage, color=None, flags=None) -> outImage
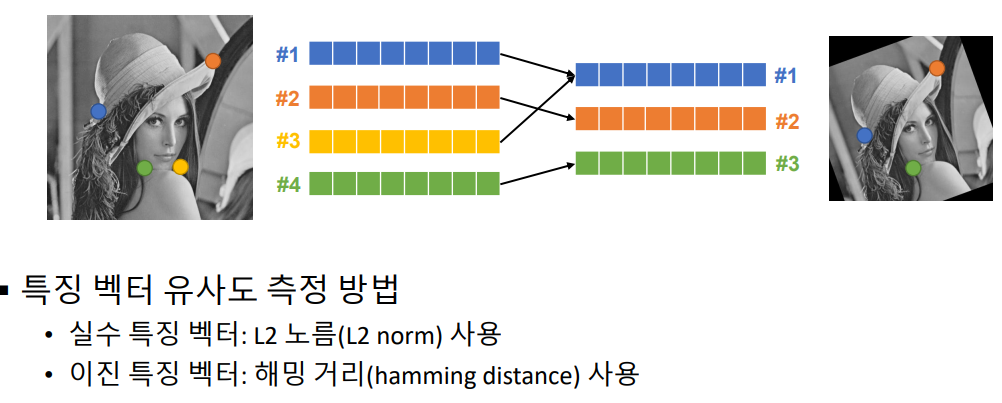
기술자 (Descriptor, feature vector)
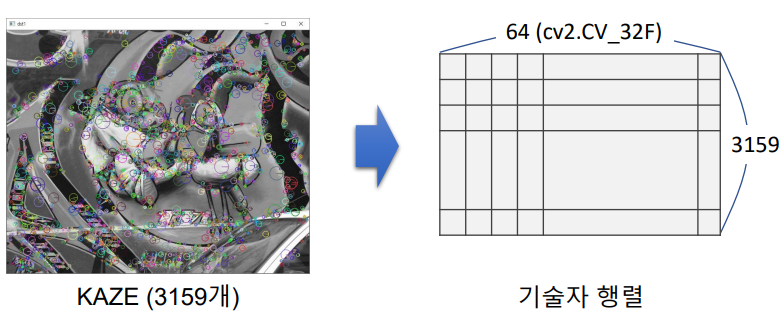
- 특징점 근방의 Local feature을 표현하는 실수 또는 이진 벡터. 위에서는 하나의 특징점이 64개 원소의 백터를 기술자로 가진다.
- 실수 특징 백터. 주로 백터 내부에는 방향 히스토그램을 특징 백터로 저장하는 알고리즘 : SIFT, SURF, KAZE
- Binary descriptor. 주변 픽셀값 크기 테스트 값을 바이너리 값으로 저장하는 알고리즘 : AKAZE, ORB, BRIEF
- 위 2. 특징점 검출에서 만든 feature 객체를 사용
- cv2.Feature2D.compute(image, keypoints) -> keypoints, descriptors (이미 keypoint 있다면)
- cv2.Feature2D.detectAndCompute(image) -> keypoints, descriptors
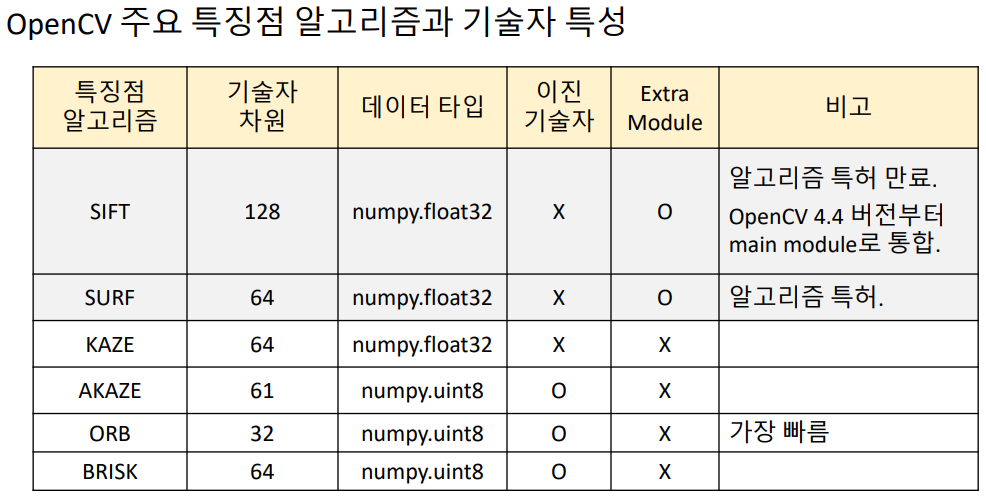
- KAZE, AKAZE이 속도 면에서 괜찮은 알고리즘. SIFT가 성능면에서 가장 좋은 알고리즘
특징점 매칭 (feature point matching)
- matcher 객체 생성 : cv2.BFMatcher_create(, normType=None, crossCheck=None)
- matching 함수1 : matcher.match(queryDescriptors, trainDescriptors)
- matching 함수2 : matcher.knnmatch(queryDescriptors, trainDescriptors)
- cv2.drawMatches(img1, keypoints1, img2, keypoints2)
좋은 매칭 선별
가장 좋은 매칭 결과에서 distance 값이 작은 것부터 사용하기 위해,
cv2.DMatch.distance 값을 기준으로 정렬 후 상위 N개 선택
# 특징점 매칭 matcher = cv2.BFMatcher_create() matches = matcher.match(desc1, desc2) # 좋은 매칭 결과 선별 1번 (선발되는 mathcing 수는 내가 선택하기 나름) matches = sorted(matches, key=lambda x: x.distance) good_matches = matches[:80] # 좋은 매칭 결과 선별 2번 (전체 매칭 3159개 중, 384개가 선발됨) good_matches = [] for m in matches: if m[0].distance / m[1].distance < 0.7: good_matches.append(m[0]) # 특징점 매칭 결과 영상 생성 dst = cv2.drawMatches(src1, kp1, src2, kp2, good_matches, None)
호모그래피와 영상 매칭
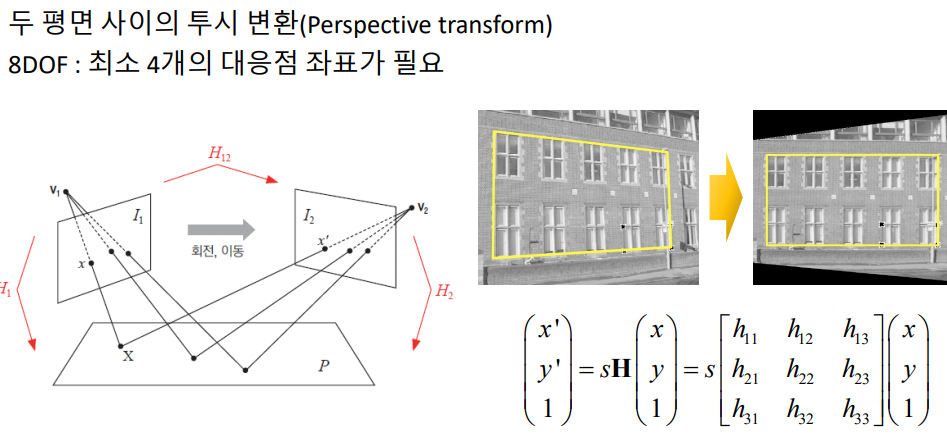
cv2.findHomography(srcPoints, dstPoints) -> retval, mask
good_matches에서 queryIdx, trainIdx 와 같이 2장의 이미지 각각에 대한 특징점 검출 됨.
pts1 = np.array([kp1[m.queryIdx].pt for m in good_matches] ).reshape(-1, 1, 2).astype(np.float32) pts2 = np.array([kp2[m.trainIdx].pt for m in good_matches] ).reshape(-1, 1, 2).astype(np.float32)
H, _ = cv2.findHomography(pts1, pts2, cv2.RANSAC)
# 좋은 매칭 결과 선별 matches = sorted(matches, key=lambda x: x.distance) good_matches = matches[:80] # 호모그래피 계산 pts1 = np.array([kp1[m.queryIdx].pt for m in good_matches] ).reshape(-1, 1, 2).astype(np.float32) pts2 = np.array([kp2[m.trainIdx].pt for m in good_matches] ).reshape(-1, 1, 2).astype(np.float32) # Find Homography H, _ = cv2.findHomography(pts1, pts2, cv2.RANSAC) # 일단 matching된거 그리기 dst = cv2.drawMatches(src1, kp1, src2, kp2, good_matches, None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS) # perspectiveTransform 하기 위한 다각형 꼭지점 설정 (h, w) = src1.shape[:2] corners1 = np.array([[0, 0], [0, h-1], [w-1, h-1], [w-1, 0]] ).reshape(-1, 1, 2).astype(np.float32) # perspectiveTransform 적용 corners2 = cv2.perspectiveTransform(corners1, H) corners2 = corners2 + np.float32([w, 0]) # drawMatches에서 오른쪽 영상이 왼쪽 영상 옆에 붙어서 나타나므로, 오른쪽 영상을 위한 coners2를 그쪽까지 밀어 줘야 함 # 다각형 그리기 cv2.polylines(dst, [np.int32(corners2)], True, (0, 255, 0), 2, cv2.LINE_AA)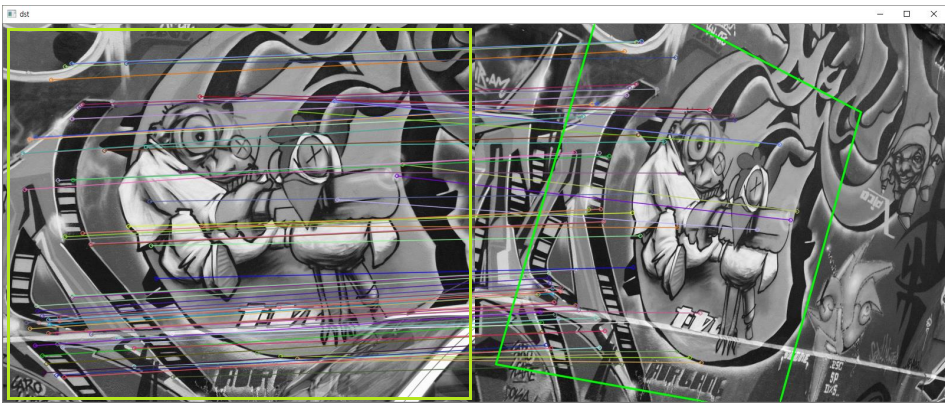
이미지 스티칭
동일 장면의 사진을 자연스럽게(seamless) 붙여서 한 장의 사진으로 만드는 기술
특징점과 matching 등등 매우 복잡한 작업이 필요하지만, OpenCV에서 하나의 함수로 구현되어 있다.
cv2.Stitcher_create(, mode=None) -> retval, pano
# 이미지 가져오기 img_names = ['img1.jpg', 'img2.jpg', 'img3.jpg'] imgs = [] for name in img_names: img = cv2.imread(name) imgs.append(img) # 가져온 이미지, Stitcher에 때려넣기 stitcher = cv2.Stitcher_create() _, dst = stitcher.stitch(imgs) cv2.imwrite('output.jpg', dst)
: AR 비디오 플레이어
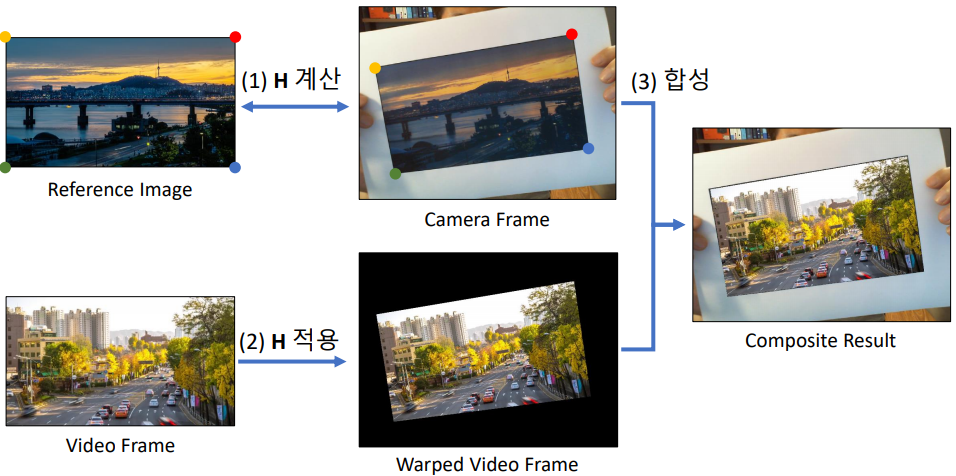
아래의 코드는 핵심만 기술해 놓은 코드. 전체는 ARPlayer.py파일 참조
# AKAZE 특징점 알고리즘 객체 생성 detector = cv2.AKAZE_create() # 기준 영상에서 특징점 검출 및 기술자 생성 kp1, desc1 = detector.detectAndCompute(src, None) # 해밍 거리를 사용하는 매칭 객체 생성 matcher = cv2.BFMatcher_create(cv2.NORM_HAMMING) while True: ret1, frame1 = cap1.read() # 카메라 영상(Reference Image 나옴) # 호모그래피 계산 H, inliers = cv2.findHomography(pts1, pts2, cv2.RANSAC) # 비디오 프레임을 투시 변환 video_warp = cv2.warpPerspective(frame2, H, (w, h)) white = np.full(frame2.shape[:2], 255, np.uint8) # Video 파일 white = cv2.warpPerspective(white, H, (w, h)) # 비디오 프레임을 카메라 프레임에 합성 cv2.copyTo(video_warp, white, frame1)
10. 객체 추적과 모션 백터
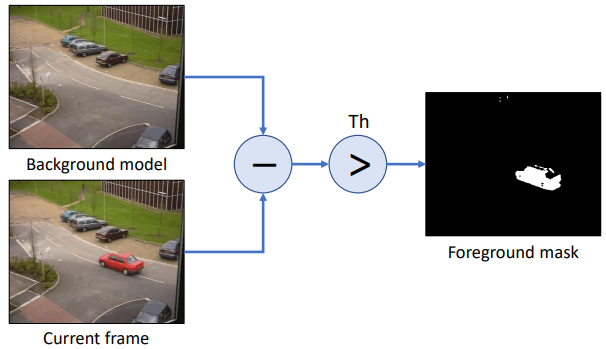
배경 차분 : 정적 배경 차분
- 배경 차분(Background Subtraction: BS) : 등록된 배경 이미지과 현재 입력 프레임 이미지와의 차이(img-src) 영상+Threshold을 이용하여 전경 객체를 검출
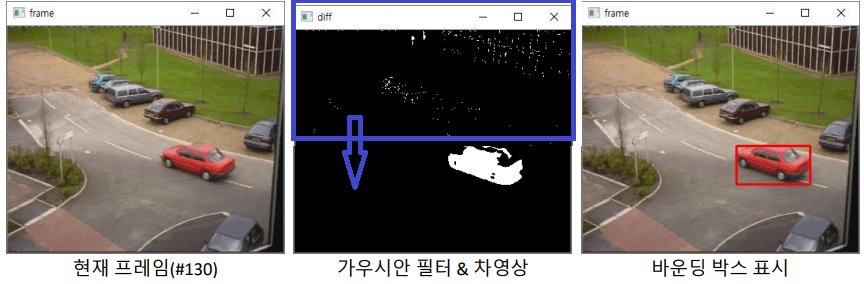
- 위의 Foreground mask에다가, 가이시안 필터 -> 레이블링 수행 -> 픽셀 수 100개 이상은 객체만 바운딩 박스 표시
배경 차분 : 이동 평균 배경
- 위의 방법은, 조도변화에 약하고 주차된 차도 움직이지 않아야 할 민큼 배경 이미지가 불변해야 한다.
- 이와 같은 평균 영상을 찾자
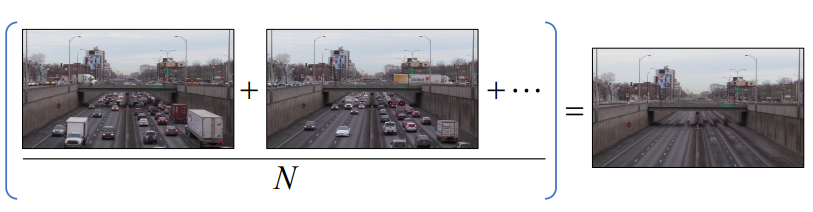
- 매 프레임이 들어올 때마다 평균 영상을 갱신
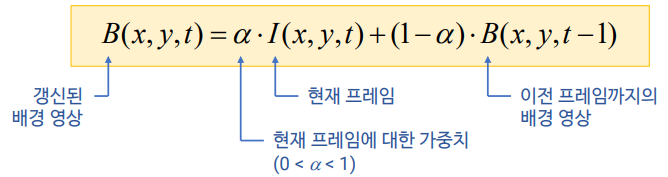
- cv2.accumulateWeighted(src, dst, alpha, mask=None) -> dst
즉, dst(x ,y ) = (1 - alpha) * dst(x ,y ) + alpha src(x ,y )
배경 차분 : MOG 배경 모델(Mixture of Gaussian = Gaussian Mixture Model))
배경 픽셀값 하나하나가, 어떤 가오시간 분표를 따른다고 정의하고 그 분포를 사용하겠다.
각 픽셀에 대해 MOG 확률 모델을 설정하여 배경과 전경을 구분 (구체적인 내용은 직접 찾아서 공부해보기-paper : Improved adaptive Gaussian mixture model for background subtraction)
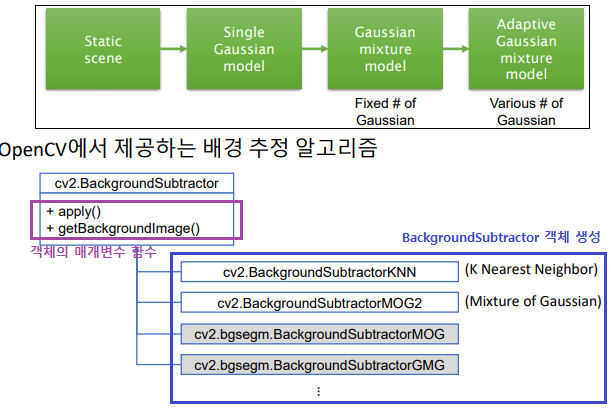
cap = cv2.VideoCapture('PETS2000.avi') bs = cv2.createBackgroundSubtractorMOG2() #bs = cv2.createBackgroundSubtractorKNN() # 직접 테스트 하고 사용 해야함. 뭐가 더 좋다고 말 못함. #bs.setDetectShadows(False) # 125 그림자값 사용 안함 while True: ret, frame = cap.read() gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) fgmask = bs.apply(gray) # 0(검) 125(그림자) 255(백) back = bs.getBackgroundImage()- 동영상을 보면, 생각보다 엄청 잘되고, 엄청 신기하다…
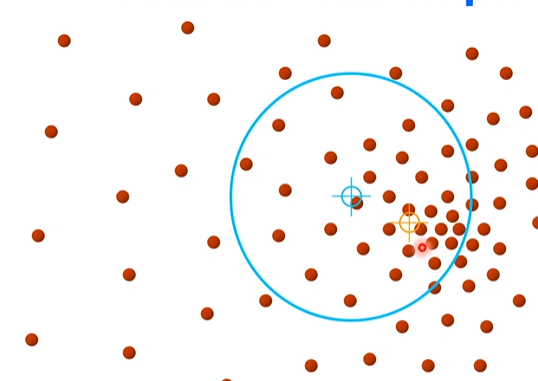
평균 이동(Mean shift) 알고리즘
Tracking : Mean Shift, CamShift, Optical Flow, Trackers in OpenCV 3.x
Mean shift=mode seeking : 데이터가 가장 밀집되어 있는 부분을 찾아내기 위한 방법, 예를 들어 가오시안 이면 평균 위치를 찾는 방법. 아래에 하늘색 원을 랜덤으로 생성한 후, 그 내부의 빨간색 원들의 x,y평균을 찾는다. 그리고 그 x,y평균점으로 하늘색 원을 옮겨 놓는다(이래서 Mean shift). 이 작업을 반복하다 보면, 결국 하늘색 원은 빨간색 원이 가장 밀집한 곳으로 옮겨 가게 된다.
사람의 얼굴 살색을, 히스토그램 역투영법으로 찾은 후 그 영역에 대한 평균점을 찾아가면서 Tracking을 한다.
cv2.meanShift(probImage, window, criteria) -> retval, window
- probImage : 히스토그램 역투영 영생
- window : 초기 검색 영역 윈도우 & 결과 영역 반환
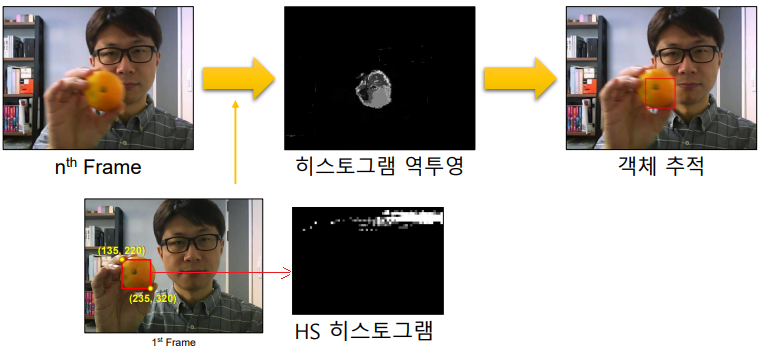
# 첫번째 프레임의 HS 히스토그램 구하기 hist = cv2.calcHist([roi_hsv], channels, None, [45, 64], ranges) # 히스토그램 역투영 & 평균 이동 추적 hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) backproj = cv2.calcBackProject([hsv], channels, hist, ranges, 1) _, rc = cv2.meanShift(backproj, rc, term_crit)히스토그램 역투영법, HS 히스토그램에 대해 궁금하면, 동영상 직접 찾아서 보기
- 단점 : 객체가 항상 같은 크기이여야 함. 예를 들어, 위의 귤이 멀어져서 작아지면 검출 안된다.
[Cam Sift(캠시프트)](https://fr.wikipedia.org/wiki/Camshift) 알고리즘
위의 단점을 해결하기 위한 알고리즘, 위의 평균 이동 알고리즘을 이용.
일단 평균 이동을 통해 박스를 이용한다. 그리고 히스토그램 역투영으로 나오는 영역에 대해서, 최적의 타원을 그린다. 만약 타원이 평균이동박스 보다 작으면, 이동박스를 작게 변경한다. 반대로 최적의 타원이 박스보다 크다면, 이동박스를 크게 변경한다. 이 과정을 반복한다.
cv2.CamShift(probImage, window, criteria) -> retval, window
# HS 히스토그램에 대한 역투영 & CamShift frame_hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV) backproj = cv2.calcBackProject([frame_hsv], channels, hist, ranges, 1) ret, rc = cv2.CamShift(backproj, rc, term_crit)
루카스-카나데 옴티컬 플로우(OneDrive\20.2학기\컴퓨터비전\OpticalFlow.pdf참조)
Optical flow : 객체의 움직임에 의해 나타나는 객체의 이동 (백터) 정보 패턴. 아래 식에서 V는 객체의 x,y방향 움직임 속도이고, I에 대한 미분값은 엣지검출시 사용하는 픽셀 미분값이다. (컴퓨터비전-윤성의교수님 강의 자료에 예시 문제 참고)
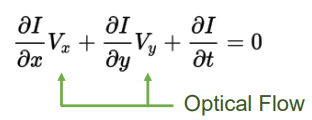
추가 가정 : 이웃 픽셀은 같은 Flow를 가짐 → NxN Window를 사용하면 N^2개 방정식 → Least squares method
루카스-카나데 알고리즘(Lucas-Kanade algorithm)
- cv2.calcOpticalFlowPyrLK(…) : input parameter는 강의자료 + Official document 공부
- Sparse points에 대한 이동 벡터 계산 → 특정 픽셀에서 옵티컬플로우 벡터 계산
- 몇몇 특정한 점들에 대해서만, Optical Flow를 계산하는 방법
파네백 알고리즘(Farneback’s algorithm)
- cv2.calcOpticalFlowFarneback(…) : input parameter는 강의자료 + Official document 공부
- Dense points에 대한 이동 벡터 계산 → 모든 픽셀에서 옵티컬플로우 벡터 계산
이미지 전체 점들에 대해서, Optical Flow를 계산하는 방법
# 루카스-카나데 알고리즘(Lucas-Kanade algorithm) pt1 = cv2.goodFeaturesToTrack(gray1, 50, 0.01, 10) pt2, status, err = cv2.calcOpticalFlowPyrLK(src1, src2, pt1, None) # 2개 이미지 겹친 이미지 만들기 dst = cv2.addWeighted(src1, 0.5, src2, 0.5, 0) # 화면에 백터 표현하기 for i in range(pt2.shape[0]): if status[i, 0] == 0: continue cv2.circle(dst, tuple(pt1[i, 0]), 4, (0, 255, 255), 2, cv2.LINE_AA) cv2.circle(dst, tuple(pt2[i, 0]), 4, (0, 0, 255), 2, cv2.LINE_AA) cv2.arrowedLine(dst, tuple(pt1[i, 0]), tuple(pt2[i, 0]), (0, 255, 0), 2)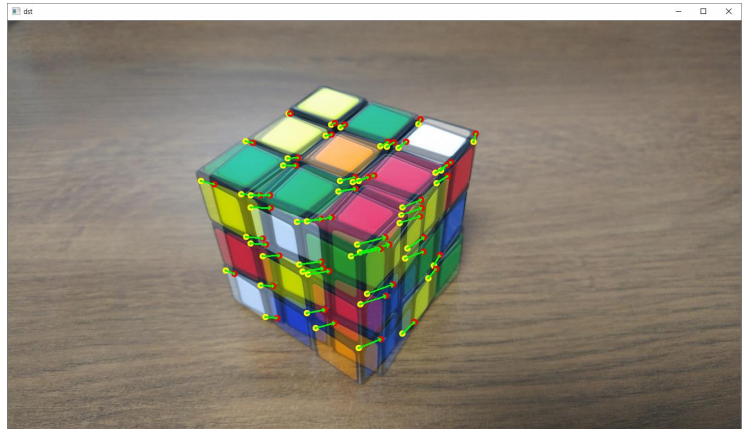
밀집 옵티컬플로우 (파네백 알고리즘 예제)
만약 필요하다면, 아래의 코드를 그대로 가져와서 사용하기. 한줄한줄 이해는 (강의자료 보는것 보다는) 직접 찾아보고 ipynb에서 직접 쳐봐서 알아내기, 어렵지 않음
# dense_op1.py flow = cv2.calcOpticalFlowFarneback(gray1, gray2, None,0.5, 3, 13, 3, 5, 1.1, 0) mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1]) hsv[..., 0] = ang*180/np.pi/2 hsv[..., 2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX) bgr = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR) cv2.imshow('frame', frame2) cv2.imshow('flow', bgr) gray1 = gray2# # dense_op2.py def draw_flow(img, flow : calcOpticalFlowFarneback의 out값, step=16): h, w = img.shape[:2] y, x = np.mgrid[step/2:h:step, step/2:w:step].reshape(2, -1).astype(int) fx, fy = flow[y, x].T lines = np.vstack([x, y, x+fx, y+fy]).T.reshape(-1, 2, 2) lines = np.int32(lines + 0.5) vis = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR) cv2.polylines(vis, lines, 0, (0, 255, 255), lineType=cv2.LINE_AA) for (x1, y1), (_x2, _y2) in lines: cv2.circle(vis, (x1, y1), 1, (0, 128, 255), -1, lineType=cv2.LINE_AA) return vis
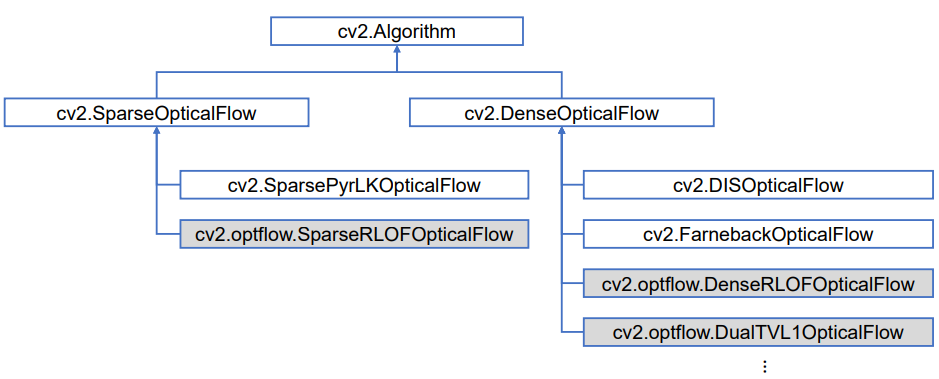
Optical flow를 사용하기 위해서 추천하는 함수들 : 맨 위가 가장 parents,super class이고 아래로 갈 수록 상속을 받는 Derived class,child class,sub class 등이 있다.
OpenCV 트래커
OpenCV 4.5 기준으로 4가지 트래킹 알고리즘 지원 (4.1 기준 8가지 지원. 사용안되는건 지원에서 빼 버린것 같다)
TrackerCSRT, TrackerGOTURN, TrackerKCF, TrackerMIL

cap = cv2.VideoCapture('tracking1.mp4') tracker = cv2.TrackerKCF_create() ret, frame = cap.read() rc = cv2.selectROI('frame', frame) tracker.init(frame, rc) while True: ret, frame = cap.read() ret, rc = tracker.update(frame) rc = [int(_) for _ in rc] cv2.rectangle(frame, tuple(rc), (0, 0, 255), 2)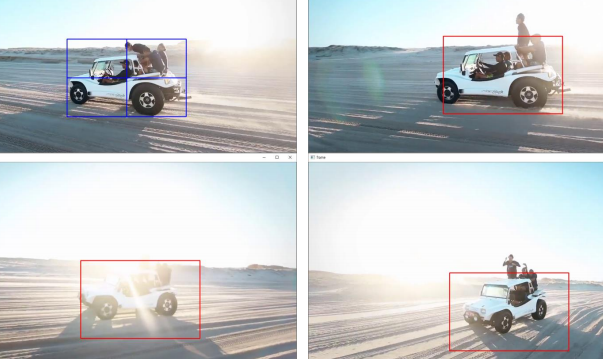
실전 코딩: 핸드 모션 리모컨
움직임이 있는 영역 검출 / 움직임 벡터의 평균 방향 검출
cv2.calcOpticalFlowFarneback() -> 움직임 벡터 크기가 특정 임계값(e.g. 2 pixels)보다 큰 영역 안의 움직임만 고려
움직임 벡터의 x방향 성분과 y방향 성분의 평균 계산
mx = cv2.mean(vx, mask=motion_mask)[0] my = cv2.mean(vy, mask=motion_mask)[0] m_mag = math.sqrt(mx*mx + my*my) if m_mag > 4.0: m_ang = math.atan2(my, mx) * 180 / math.pi m_ang += 180- FastCampus_CV\opencv_python_ch06_ch10\ch10\hand_remocon.py