【DA】AdaptSegNet-Learning to Adapt Structured Output Space
- 논문 : Learning to Adapt Structured Output Space for Semantic Segmentation
- 분류 : Domain Adaptation
- 읽는 배경 : Domain Adaptation 기본, Adversarial code의 좋은 예시
- 느낀점 :
- 참고 사이트 : Github page
AdaptSegNet
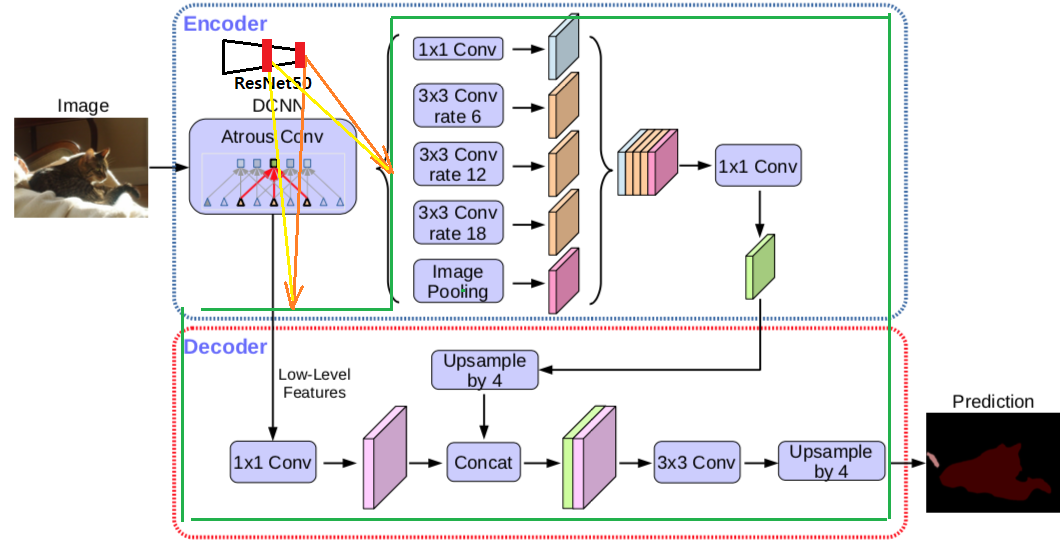
Deeplab V2를 사용했다고 한다. V2의 architecture 그림은 없으니 아래의 V3 architecture 그림 참조
AdaptSegNet 전체 Architecture
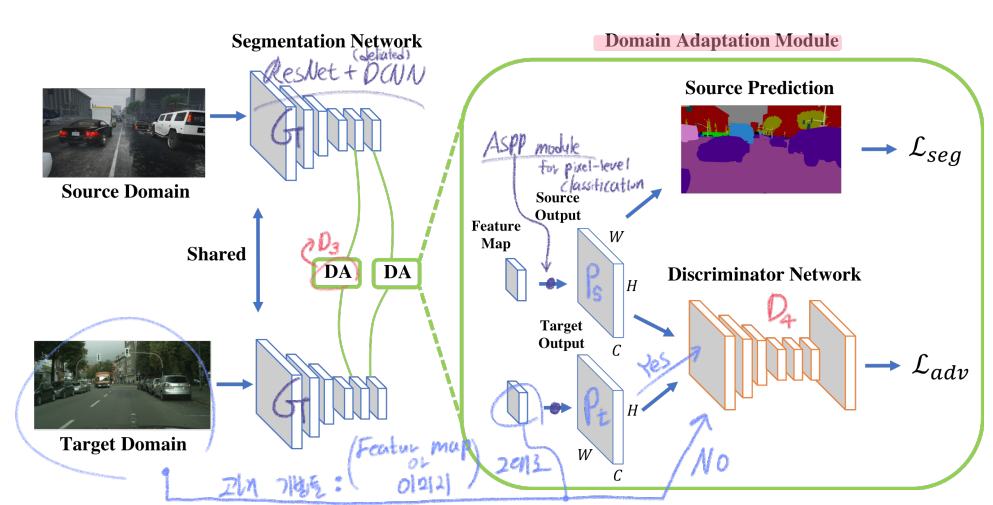
코드를 통해 배운, 가장 정확한 학습과정 그림은 해당 나의 포스트 참조.
1. Conclusion, Abstract
- DA semantic segmentation Task를 풀기 위해, adversarial learning method을 사용한다.
- 방법1 : Adversarial learning을 사용한다. in the output space(last feature map, not interval feature map)
- 방법2 : 위의 그림과 같이 a multi-level에 대해서 adversarial network 을 사용한다. multi-level을 어떻게 사용하는지에 대해서는 위의 Deeplab V3 architecture를 참조할 것.
- 방법1의 Motivation : 아래 그림과 같이, 이미지 사이에는 많은 차이가 있지만, CNN을 모두 통과하고 나온 Output feature map은 비슷할 것이다.
- 따러서 Sementic segmentation의 예측결과 output을 사용하여, Adversarial DA과정을 진행함으로써, 좀더 효과적으로 scene layout과 local contect를 align할 수 있다.
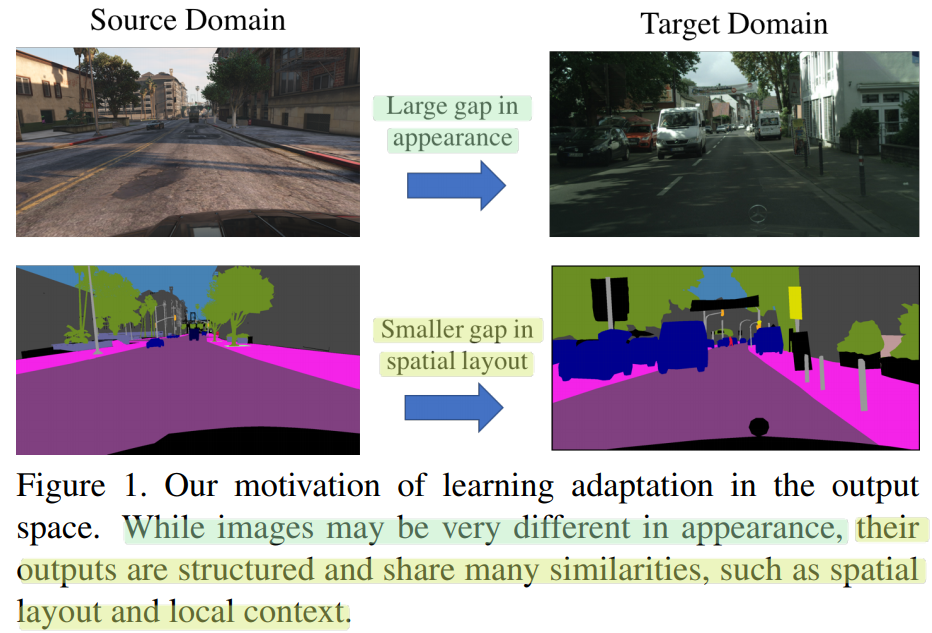
- 따러서 Sementic segmentation의 예측결과 output을 사용하여, Adversarial DA과정을 진행함으로써, 좀더 효과적으로 scene layout과 local contect를 align할 수 있다.
2. Instruction, Relative work
- pass
3. Method
- the discriminator D_i (level i): source 이미지로 부터온 prediction Ps인지 Target, 이미지로 부터온 prediction Pt인지 구별한다.
- target prediction에 대한 Adversarial loss를 적용해서, G(Generator=Feature encoder)가 similar segmentation distribution를 생성하게 만든다.
- Output Space Adaptation에 대한 Motivation
- 과거의 Adversarial 방법들은, 그냥 feature space(맨 위 이미지에서 빨간색 부분=complex representations)를 사용해서 Adversarial learning을 적용했다.
- 반면에, segmentation outputs(맨위 이미지에서, hard labeling 작업 이전의 최종 예측 결과값)은low-dimension이지만 rich information을 담고 있다.
- 우리의 직관으로 이미지가 source이든 target이든 상관없이, segmentation outputs은 굉장히 강한 유사성을 가지고 있을 것이다.
- 따라서 우리는 이러한 직관과 성질을 이용해서, low-dimensional softmax outputs을 사용한 Adversarial Learning을 사용한다.
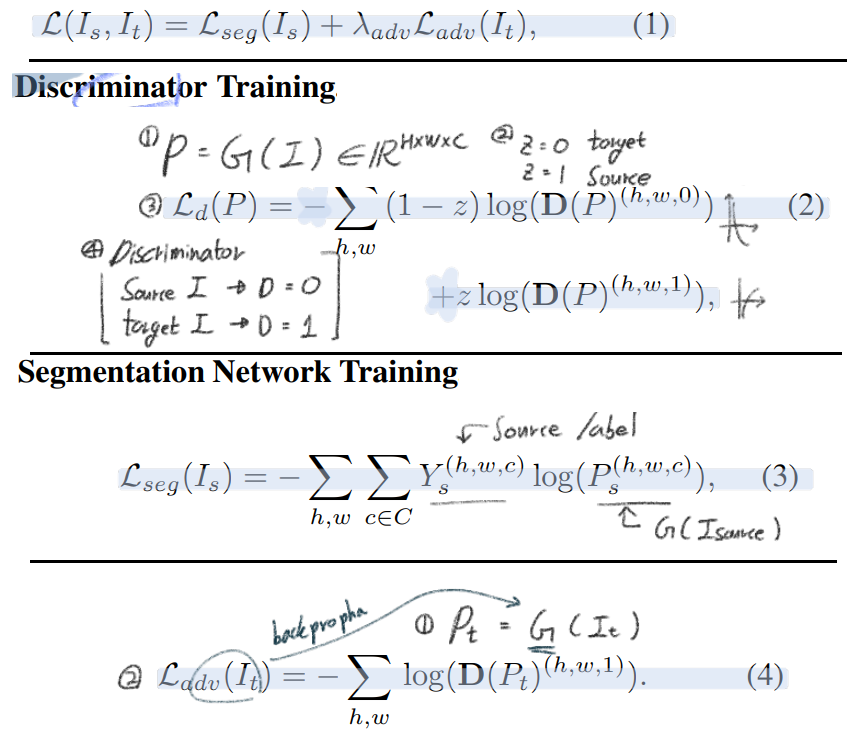
- Single-level Adversarial Learning: 아래 수식들에 대해서 간단히 적어보자
- Total Loss
- Discriminator Loss: Discriminator 만들기
- Sementic segmentation prediction network
- Adversarial Loss: Generator(prediction network)가 target 이미지에 대해서도 비슷한 출력이 나오게 만든다
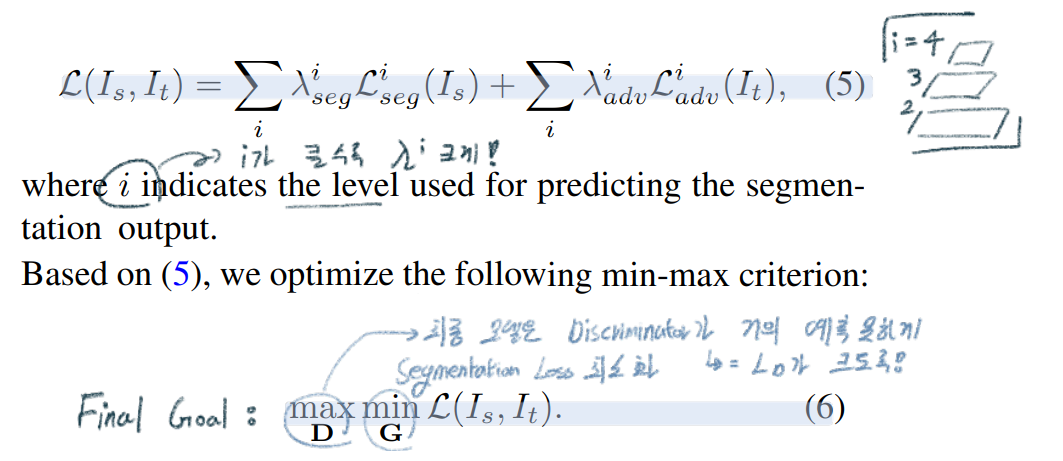
- Multi-level Adversarial Learning
- Discriminator는 feature level마다 서로 다른 Discriminator를 사용한다
- i level feature map에 대해서 ASPP module(pixel-level classification model)을 통과시키고 나온 output을 위 이미지의 (2),(3),(4)를 적용한다.
- Network Architecture and Training
- Discriminator
- all fully-convolutional layers, convolution layers with kernel 4 × 4 and stride of 2, channel number is {64, 128, 256, 512, 1},
- leaky ReLU parameterized by 0.2
- do not use any batch-normalization layers: small batch size를 놓고 각 source batch, target batch 번갈아가면서 사용했기 때문이다.
- Segmentation Network
- e DeepLab-v2 [2] framework with ResNet-101 [11] model
- modify the stride of the last two convolution layers from 2 to 1 함으로써, 최종결과가 이미지 H,W 각각이 H/8, W/8이 되도록 만들었다.
- an up-sampling layer along with the softmax output
- Multi-level Adaptation Model
- we extract feature maps from the conv4 layer and add an ASPP module as the auxiliary classifier
- In this paper, we use two levels.
- 위 그림을 보면 이해가 쉽니다.
- Network Training(학습 과정)
- (Segmentation Network와 Discriminators를 효율적으로 동시에 학습시킨다.)
- 위의 Segmentation Network에 Source 이미지를 넣어서 the output Ps를 생성한다.
- L_seg를 계산해서 Segmentation Network를 Optimize한다.
- Segmentation Network에 Target 이미지를 넣어서 the output Pt를 생성한다.
- Optimizing L_d in (2). 위에서 만든 Ps, Pt를 discriminator에 넣고 학습시킨다.
- Adversarial Learning : Pt 만을 이용해서 the adversarial loss를 계산하여, Segmentation Network를 Adaptation 시킨다.
- Hardware
- a single Titan X GPU with 12 GB memory
- the segmentation network
- Stochastic Gradient Descent (SGD) optimizer
- momentum is 0.9 and the weight decay is 5×10−4
- initial learning rate is set as 2.5×10−4
- the discriminator
- Adam optimizer
- learning rate as 10−4 and the same polynomial decay
- The momentum is set as 0.9 and 0.99
- Discriminator
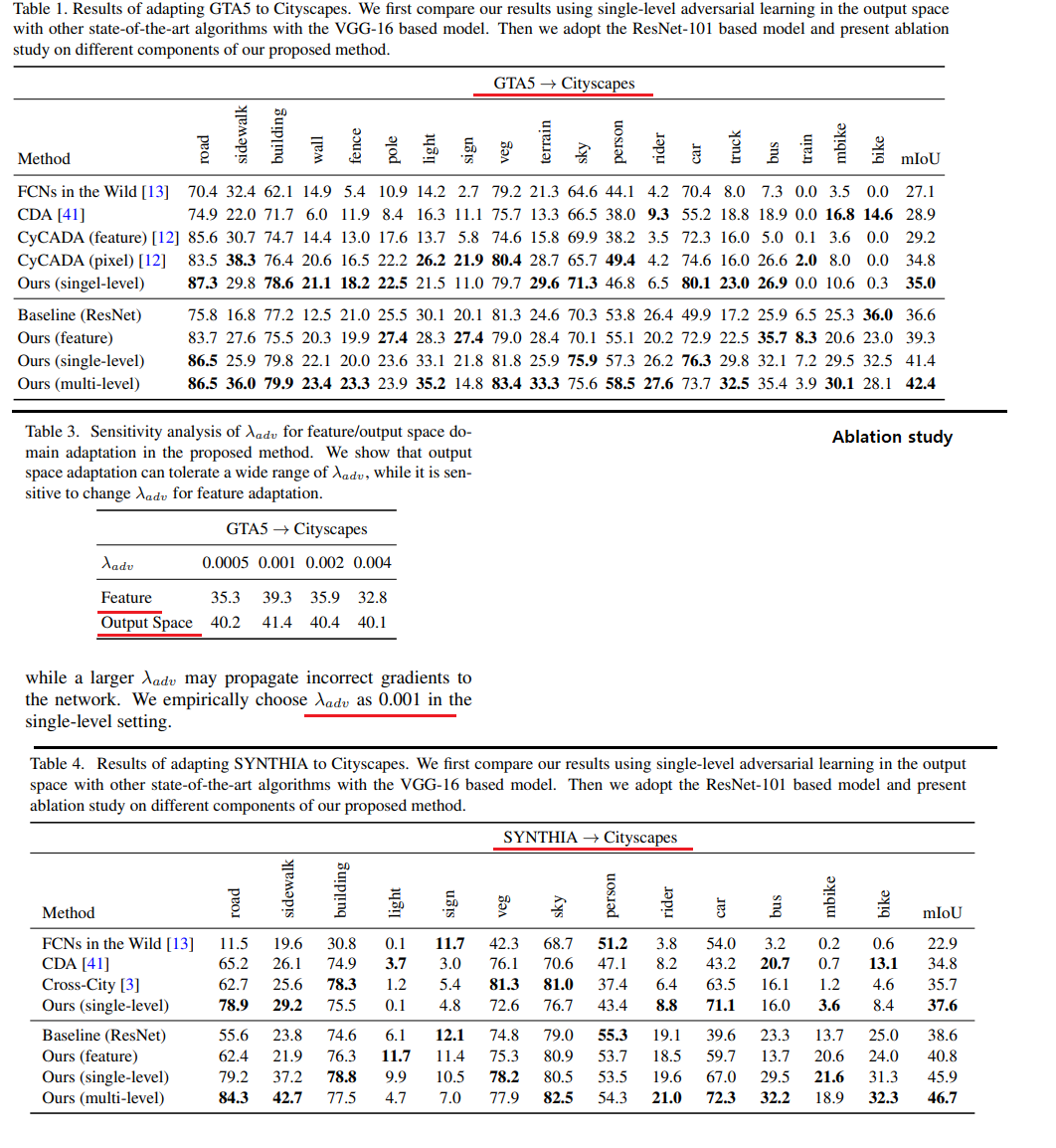
4. Results
- 성능 결과 및 Ablation study에 대한 내용은 Pass